海氷掘削ミミズロボット
関連研究:
月・惑星探査用ミミズロボット
海底探査ミミズロボット
細管内検査ミミズロボット
電線施工ミミズロボット
インフラ検査ミミズロボット
ダクト清掃ミミズロボット
研究目的
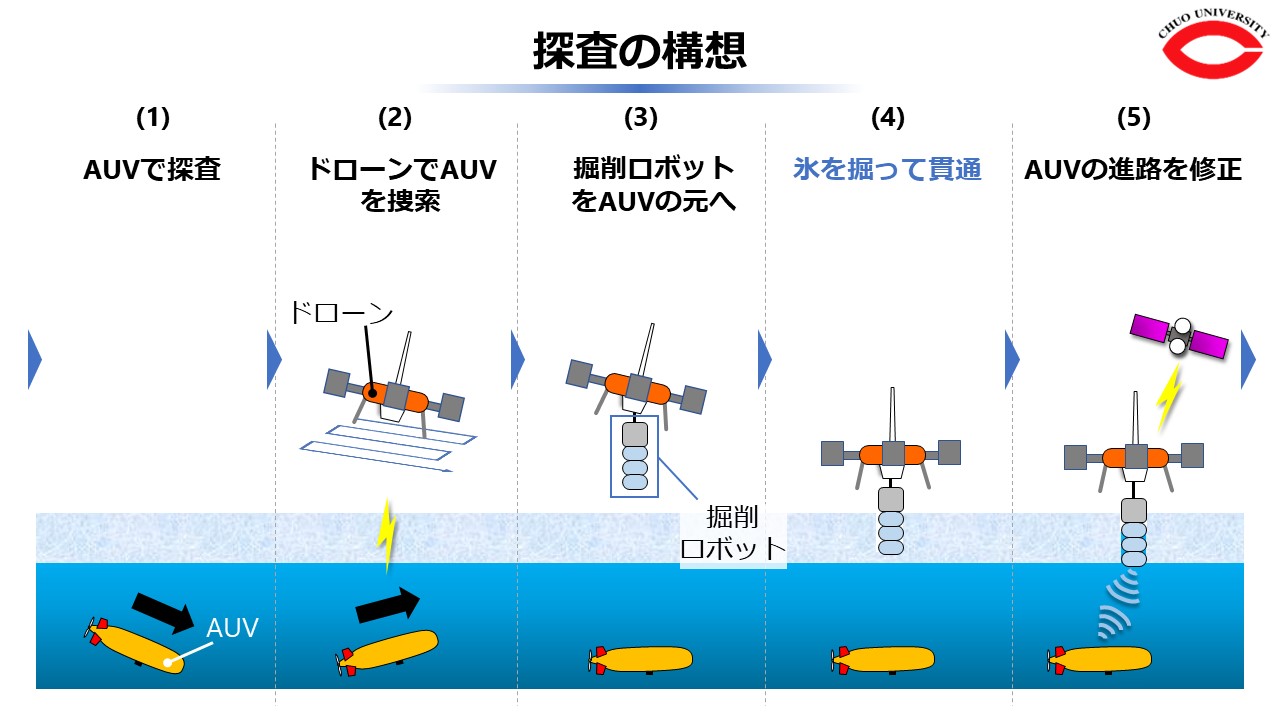
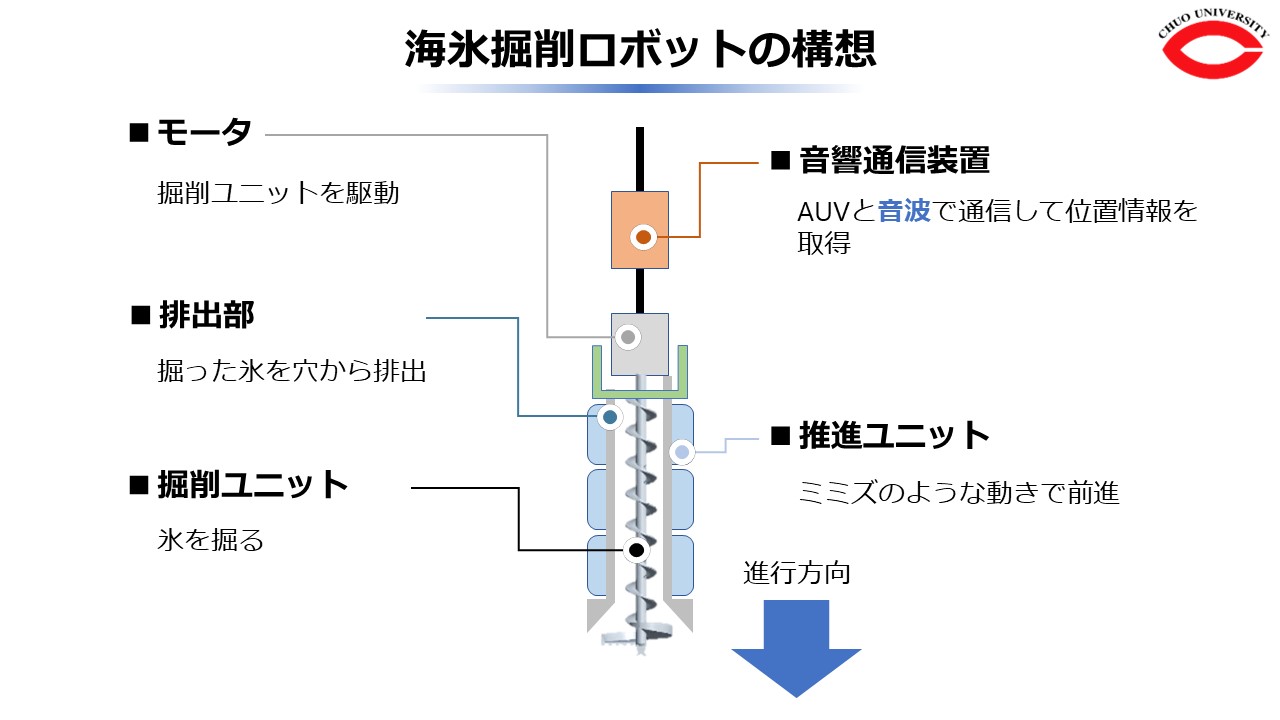
近年、地球温暖化が進行しており、北極海の海氷の融解が地球全体の気候に大きな影響を与えると言われています。しかし、まだ北極海の海氷北極海の海氷下の調査は十分に行われていません。現在調査に使用されている探査機には、通信が海氷にさえぎられて、探査範囲が狭いという課題があります。そこで、私たちは、海氷掘削ロボットを導入した海氷下探査システムを提案します。掘削ロボットを用いて探査機の通信をさえぎっている氷を掘削し、探査範囲を広げることが目標です。 海氷の掘削方法として、ミミズの蠕動運動に着目しました。ミミズの体は無数の節に分かれており、体の節を膨張させ把持し、他の節を収縮する動きを頭部から順に後方に伝播させることで、推進します。この運動には移動に必要なスペースが少ないという特長があります。この特長を活かして掘削を効率的に行うことができます。 実地実験などで得たデータをもとに、現在掘削ロボットの開発を進めています。