細管内検査ミミズロボット
関連研究:
月・惑星探査用ミミズロボット
海底探査ミミズロボット
電線施工ミミズロボット
インフラ検査ミミズロボット
ダクト清掃ミミズロボット
海氷掘削ミミズロボット
研究目的
現在,配管は家庭や工場などで水やガスを輸送するために使用されている。しかし近年、配管の破損や腐食が原因で、配管事故の発生や輸送流体の安定した供給が困難になる問題がある。このような問題を未然に防ぐために配管の検査が必要不可欠となっている。
配管の検査には工業用内視鏡が広く使用されている。しかし、内視鏡は細く複雑に入り組んだ管内や長距離配管を検査することが難しい。これは、内視鏡が管内でたわみ、後ろからの押し込む力が前に伝わらなくなることが原因である。
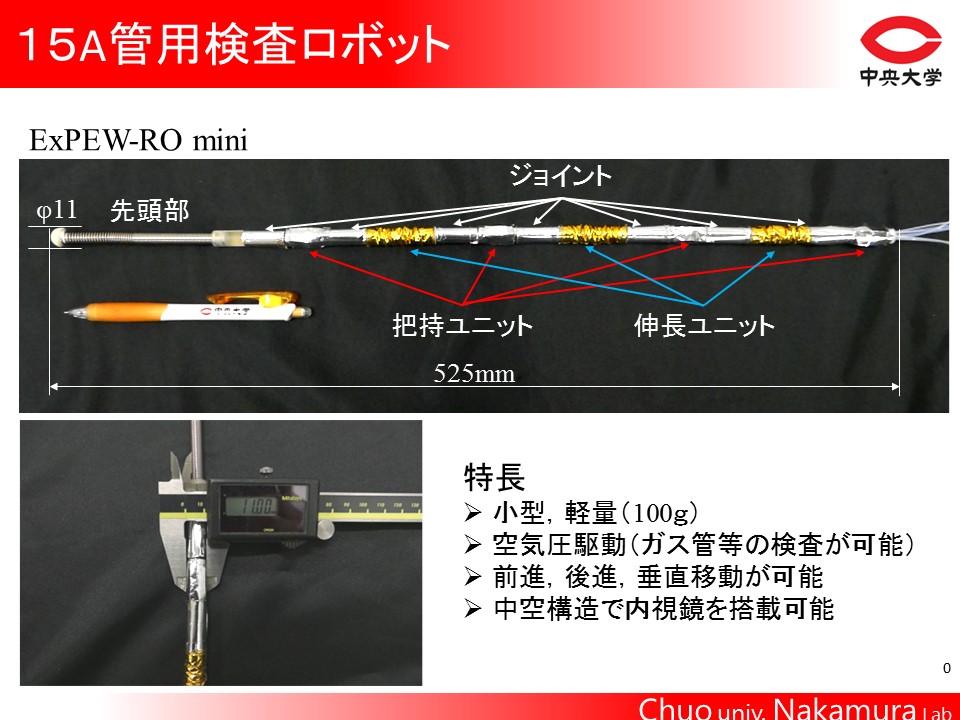
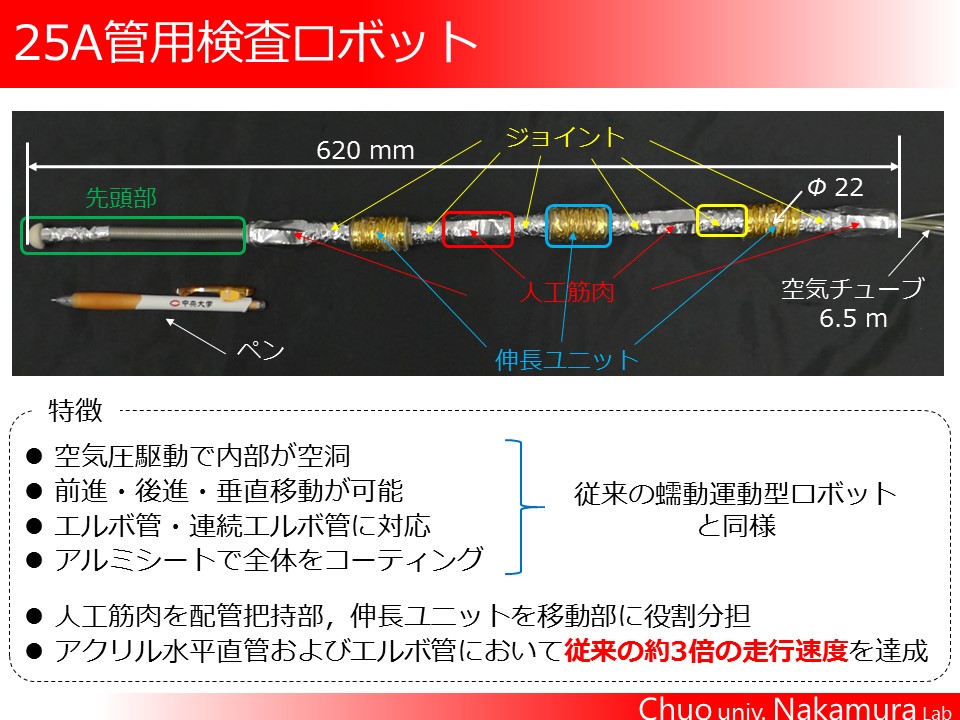
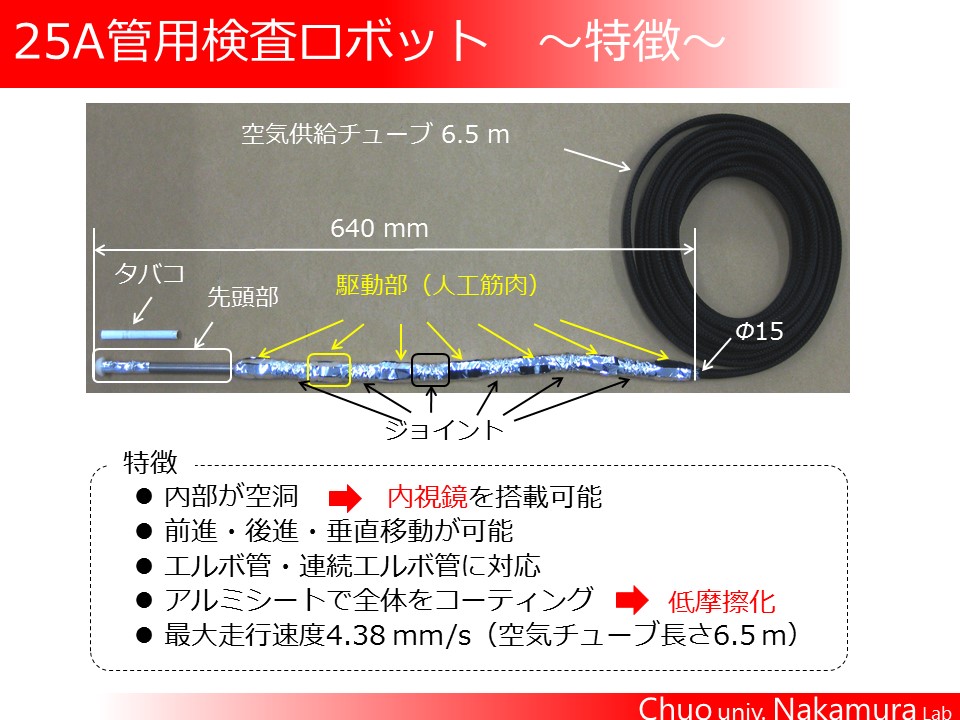
この問題は、内視鏡に自走機能を持たせることで解決できると考えた。そこで、本研究では特に管径が細く検査が困難である15A配管(管内径約16 mm)、25A配管(管内径約28 mm)に着目し、これらの細管を対象とした内視鏡ロボットの開発を行う。そして、開発したロボットを用いて複雑に入り組んだ細管内を奥深くまで検査することを本研究の目的とする。
25A配管ミミズロボット
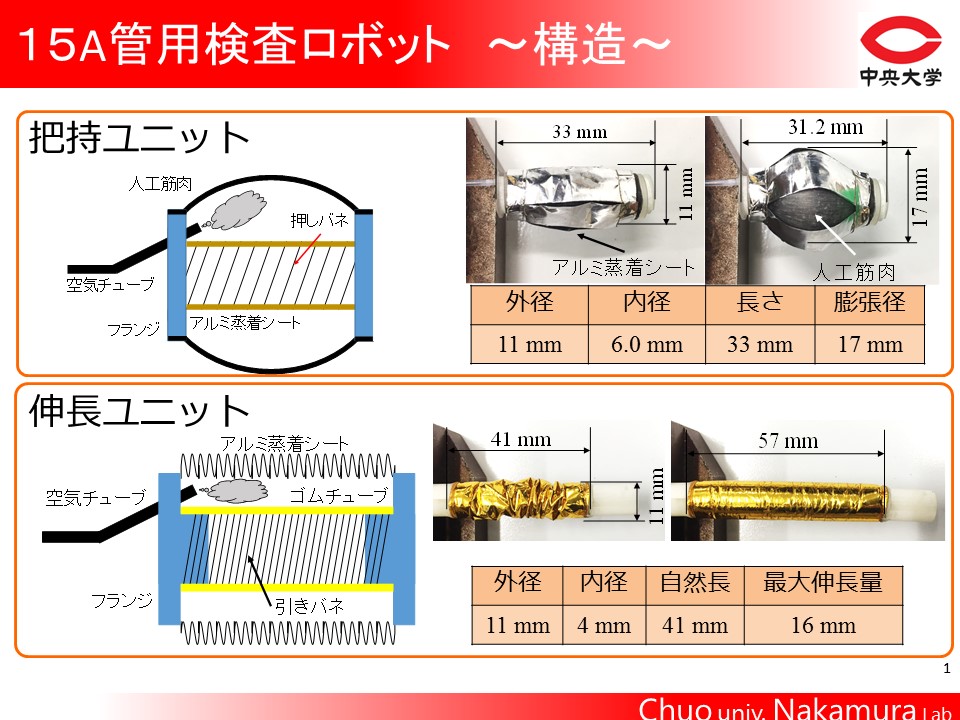
15A配管ミミズロボット