インフラ検査ミミズロボット
関連研究:
月・惑星探査用ミミズロボット
ダクト清掃ミミズロボット
海底探査ミミズロボット
細管内検査ミミズロボット
研究目的
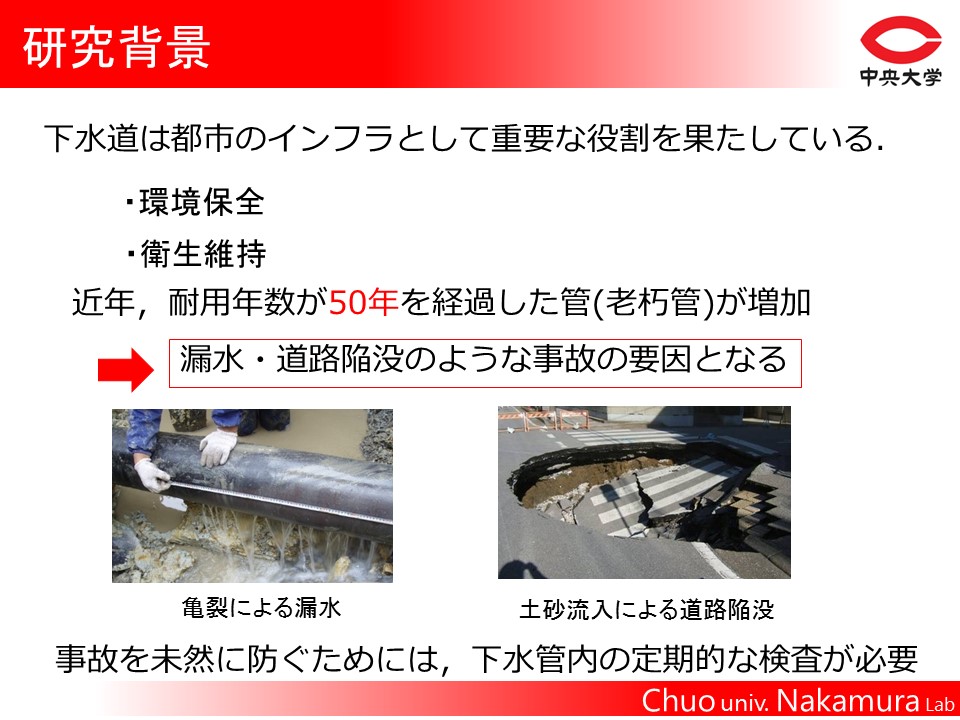
老朽化した下水管は、道路の陥没を引き起こす要因となっており、平成18年度には約4000件の道路陥没事故が報告されています。
このような陥没事故を未然に防ぐためには、配管の内部を事前に検査し、補修や交換の是非を検討する必要がありますが、従来の検査ロボットでは、「小径」「複雑な曲がり」「長距離管」の十分な検査ができませんでした。
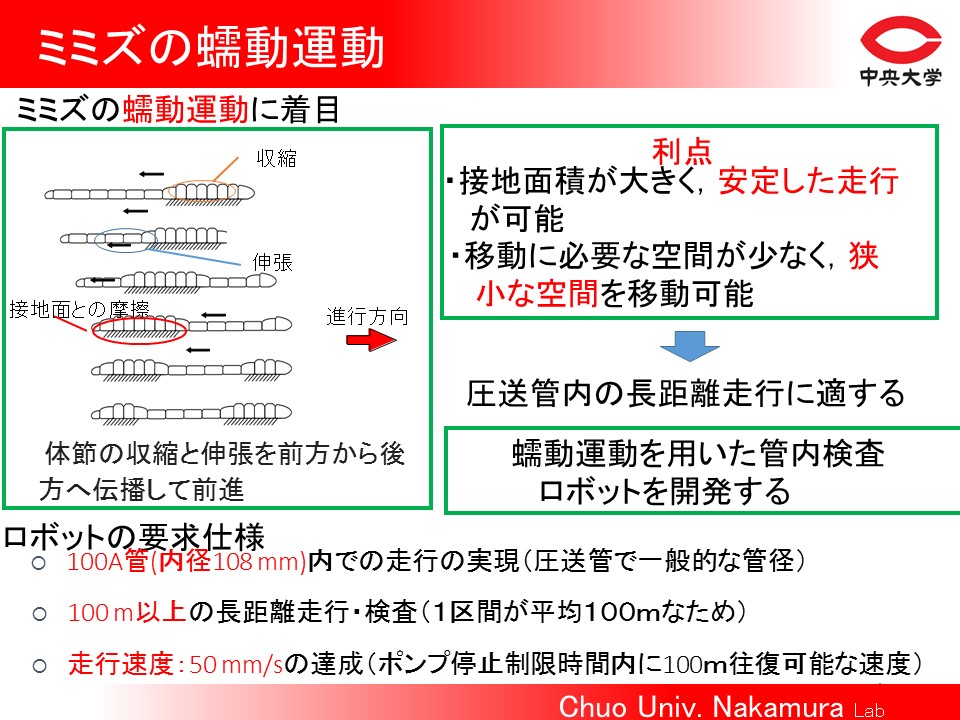
そこで、狭い空間を安定して進むことができるミミズの蠕動運動と、小さくても大きな力を得ることができる空気圧ゴム人工筋肉を組み合わせることで、あらゆる下水管の検査を目的としています。