

RESEARCH

大隅研究室で扱う研究はロボット工学に限らず、制御、力学、土木など多岐にわたります。
様々な分野を研究する学生たちが集まることで、充実した意見交換ができるのも大隅研究室の魅力の一つです。
また、新テーマの解説も行われ、研究の可能性は日々広がり続けています。
研究テーマ一覧
協調班

ロボットアームは複数台運用することで可搬重量を大きくできるが、ロボット間の位置誤差により対象物を破損させる危険性がある。そこでハンド先端にワイヤシステムを搭載することで上記の問題を解決し、安定したハンドリングを可能とする。本研究では3台のマニピュレータとワイヤシステムによる協調システムを構築し、その有用性を検証する。
合業班
近年、ロボットの導入による生産性向上が期待されているが、人手に頼っている分野も多い。そのため、人とロボットがそれぞれ得意な作業を分業するのではなく、得意技を合わせて協働することが求められている。本研究では人とロボットの協働によるねじ締め作業、人が無意識に行っている動作の解明などから、人とロボットが協働で作業を行う「合業」の実現を目指す。
柔軟物ハンドリング班
近年,食品製造業の人手不足の深刻化から,食品製造ラインにロボットを導入され始めているが,導入するにはコストが高いという欠点がある.そこで,既存のロボットハンドでハンバーグなどの様々な柔軟物体を型崩れせずに把持が可能になることによって,導入コストを抑えることができる.我々はそのシステムの実用化を目指している.
クレーンテレオペ班
クレーンは重量物の搬送に工場などで頻繫に用いられるが、振り子振動を起こしやすく、事故を招く危険性を有する。本研究では振り子振動を防止するとともに簡単に操縦できるシステム開発を目指す。
段差乗り越え班
荷物運搬用の台車は重い荷物を運べるが、段差がその障害となる。そのため段差乗り越えの補助を目的とした製品が開発されてきたが、機構が複雑・高価・一部の台車にしか取り付けられない・耐荷重性が低いといった弱点がある。本研究では安価で既存台車に取り付け可能な単純な機構の開発を目指す。
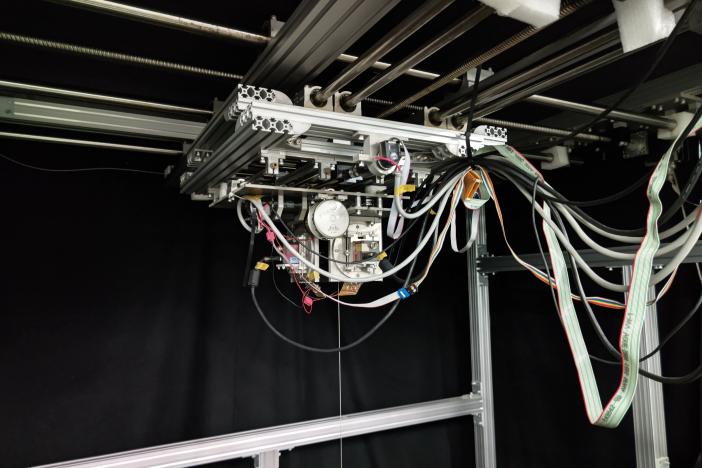
ワイヤ懸垂班
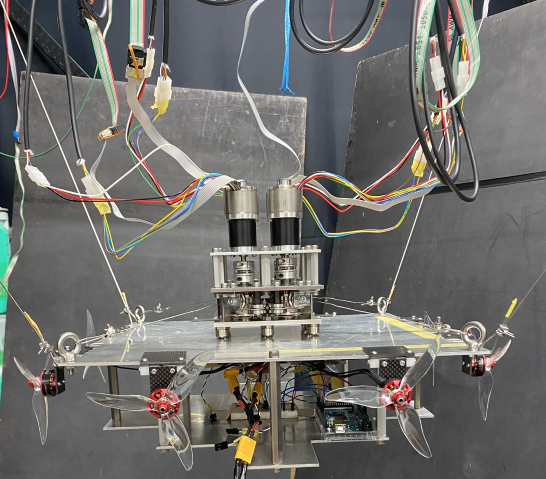
近年、多くの分野で人間の作業をロボットに代替することで、人件費の削減や作業効率の向上が期待されている。本研究では大空間での3次元移動が可能なロボットとして、4本のワイヤを用いた懸垂システムを提案し、カウンタウェイトやプロペラを用いた懸垂物の振動・姿勢制御を目指す。
© 2022 OSUMI Lab. All Rights Reserved.
Powered by JS CMS