Fisheye Group
In driving support systems such as autonomous robots and automobiles, it is extremely important to sense a wide range of surrounding environments. Therefore, we are conducting various researches using a wide-angle camera and a fish-eye camera as a sensor that performs three-dimensional measurement. The advantages of these cameras are that they can measure a wide range at once and that they can be easily mounted on automobiles and the like.
Intrinsic parameter estimation method for fisheye cameraü@
In order to use fisheye cameras for measurements, rigorous internal parameters are often required. Therefore, we are studying to obtain internal parameters easily and highly accurately. We propose a method of estimating internal parameters from the shape of feature point trajectory in three dimensional space by rotating the fish eye camera on the horizontal plane.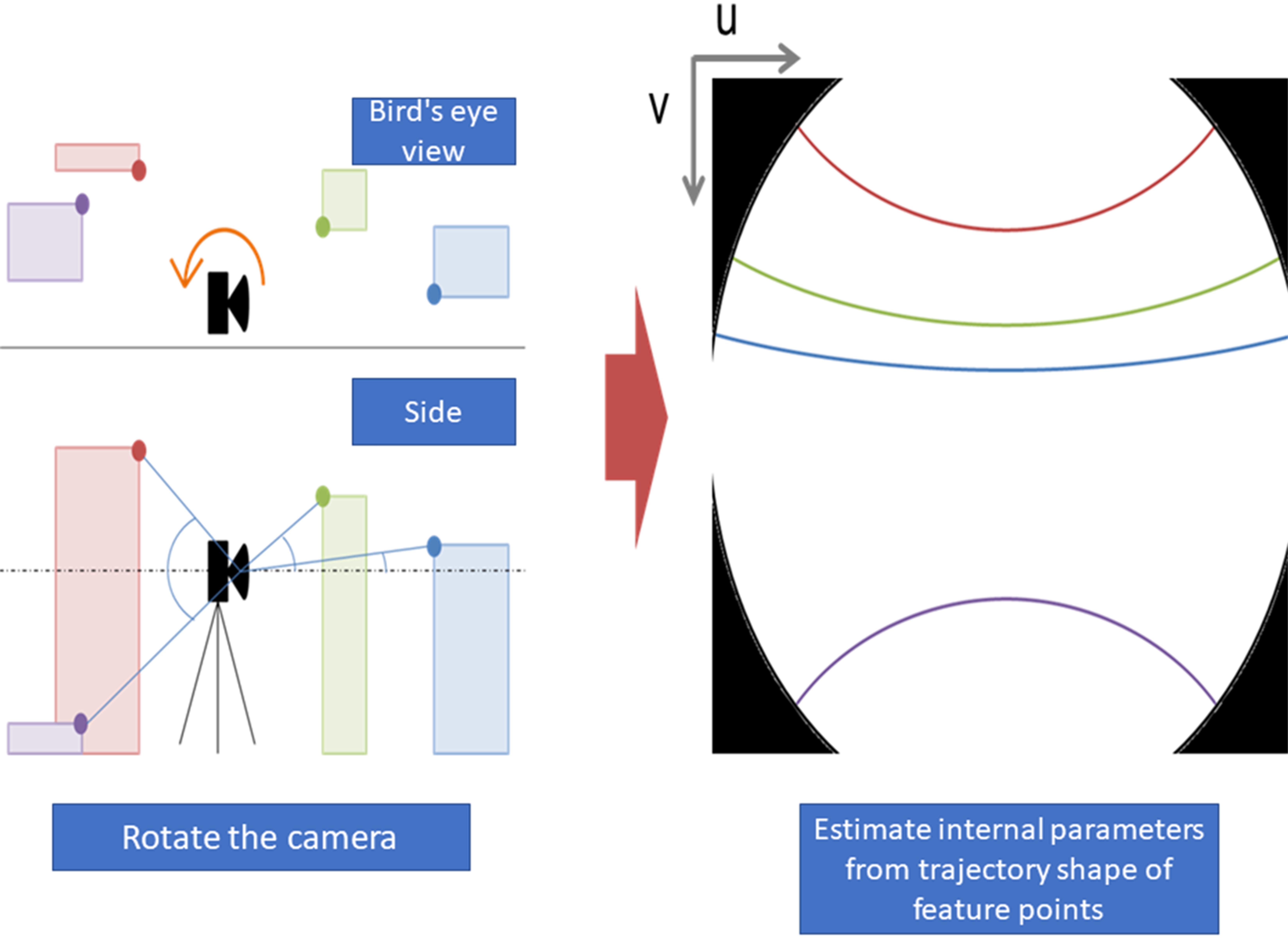 |
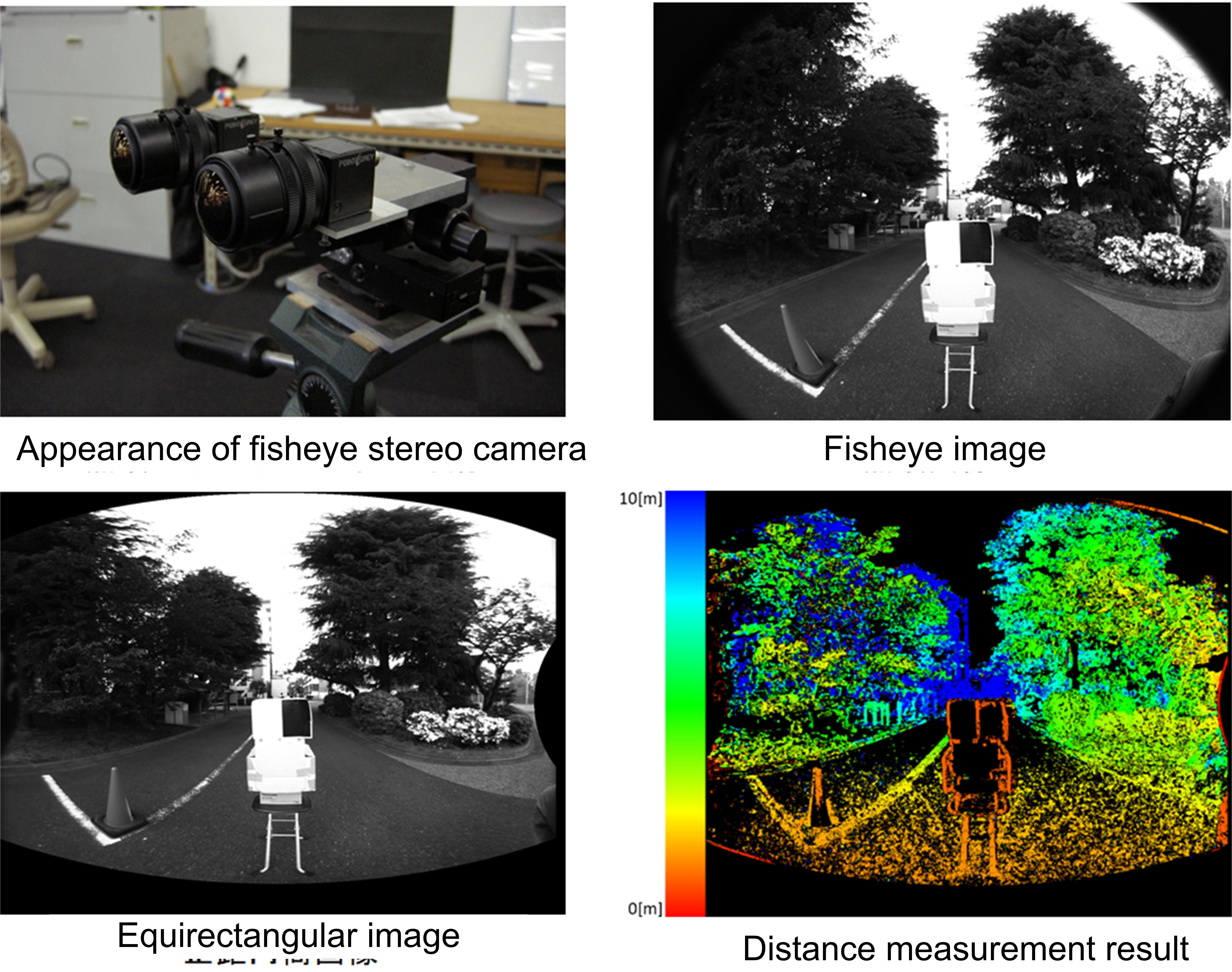
Distance measurement method using fish-eye stereo camera
Sensors mounted on vehicles are required to be able to measure a wide range of distance information in order to prevent traffic accidents. Therefore, we are conducting research to measure a wide range using a fish-eye stereo camera. We propose a method to simplify stereo matching at the edge of the image by converting the fisheye image captured by the fish-eye stereo camera into a distorted forward-cylindrical image so as to perform a wide range of three-dimensional measurement.
 |
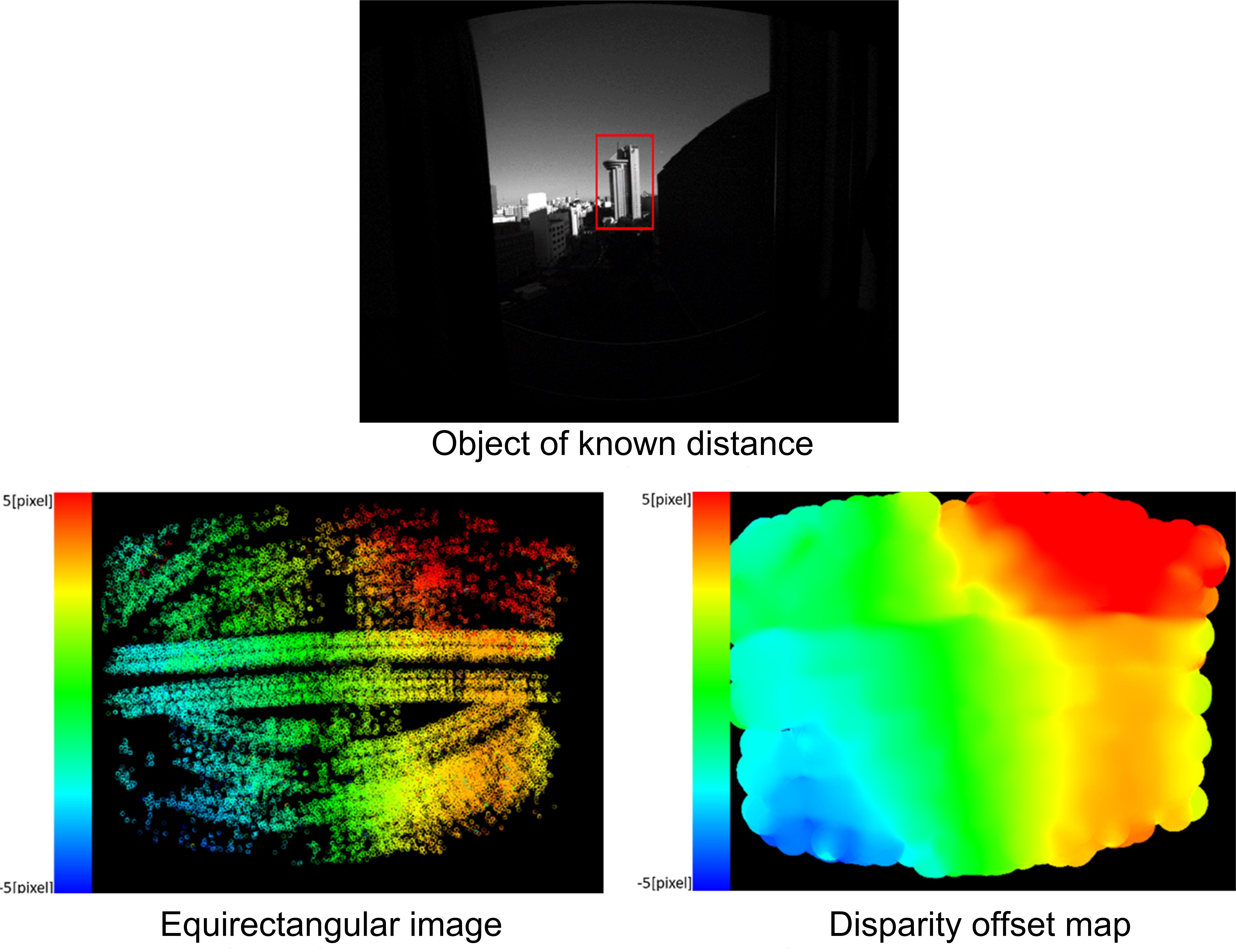
Improvement the accuracy of a fisheye stereo camera with a disparity offset map
When measuring with a stereo camera or the like, the error included in the result depends on the accuracy of the camera calibration performed in advance. Therefore, in this research, we propose a correction method using parallax of feature points obtained from objects of known distance. An error of the parallax with respect to the true value is calculated, and a parallax offset map is obtained by finding the parallax error for all the pixels on the basis of it. Then, by performing stereo matching after image conversion so as to cancel the error of the map, errors due to insufficient camera calibration are reduced.
 |
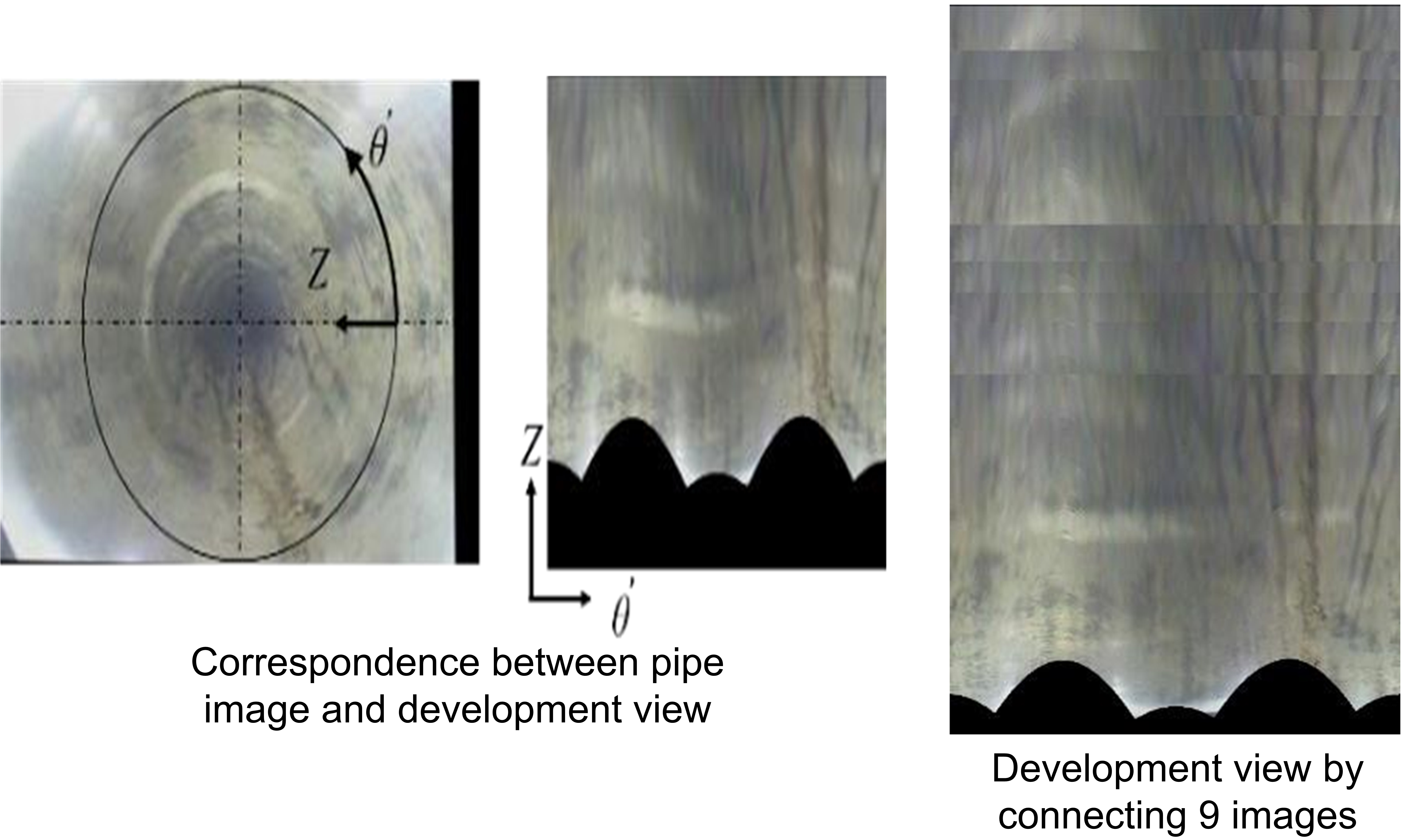
Construction of 3D map from images of interior pipes
Danger such as road collapse is increasing due to aging pipes in recent years. In order to prevent these accidents, it seems effective to construct a system that can perform precise inspection from the in-pipe image. Therefore, in this research, a development map is created from the in-pipe image captured by a wide-angle camera and a method is proposed to join the development plan based on the motion information of the camera.
 |
Three-dimensional environment reconstruction from Spatio-Temporal Image of Fish-eye camera
We reconstruct three-dimensional environments using Spatio-Temporal Images, images arranged with the several image in a time series, obtained from only one Fish-eye camera. A Fish-eye camera is super-wide angle, therefore, it enables us to measure a wide range with single camera and reduces the camera cost. This advantage allows the Fish-eye camera to be loaded on a car or other mobile robots and used to measure surrounding environments.In this studyżFish-eye camera is loaded on a mobile robot and surrounding environment is measured. And three-dimensional environments are reconstructed in consideration of the special distortion of a Fish-eye lens. As for the future work, we will realize more high accurate reconstruction. And further more we will apply this study to the driving support system for a driver and a mobile robot's autonomous locomotion.
 |
| Fish-eye image |  |
| Spatio-Temporal image using Fsish-eye image |
Copyright (C) 2004 Umeda Laboratory. All Rights Reserved