3D map building by range image sensor using multi slit light
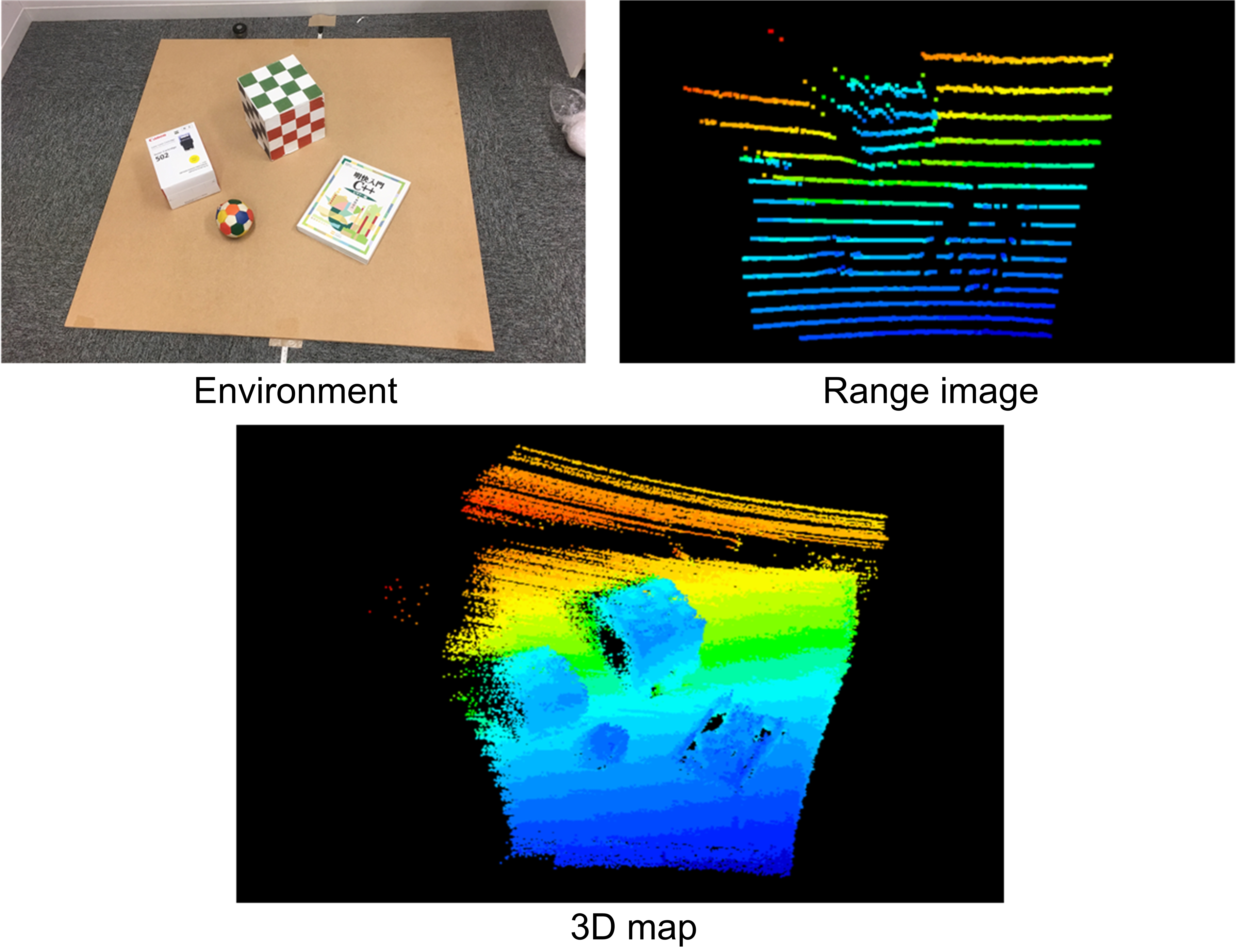
It is possible to generate a 3D map of an environment by superimposing multiple range images from range image sensor. In this research, we estimate motion parameters of the range image sensor using constraints based on distance and color images in order to build the 3D map through registration of multiple range images. In the future, we are considering improving accuracy and speeding up 3D map generation.
Small Distance Image Sensor
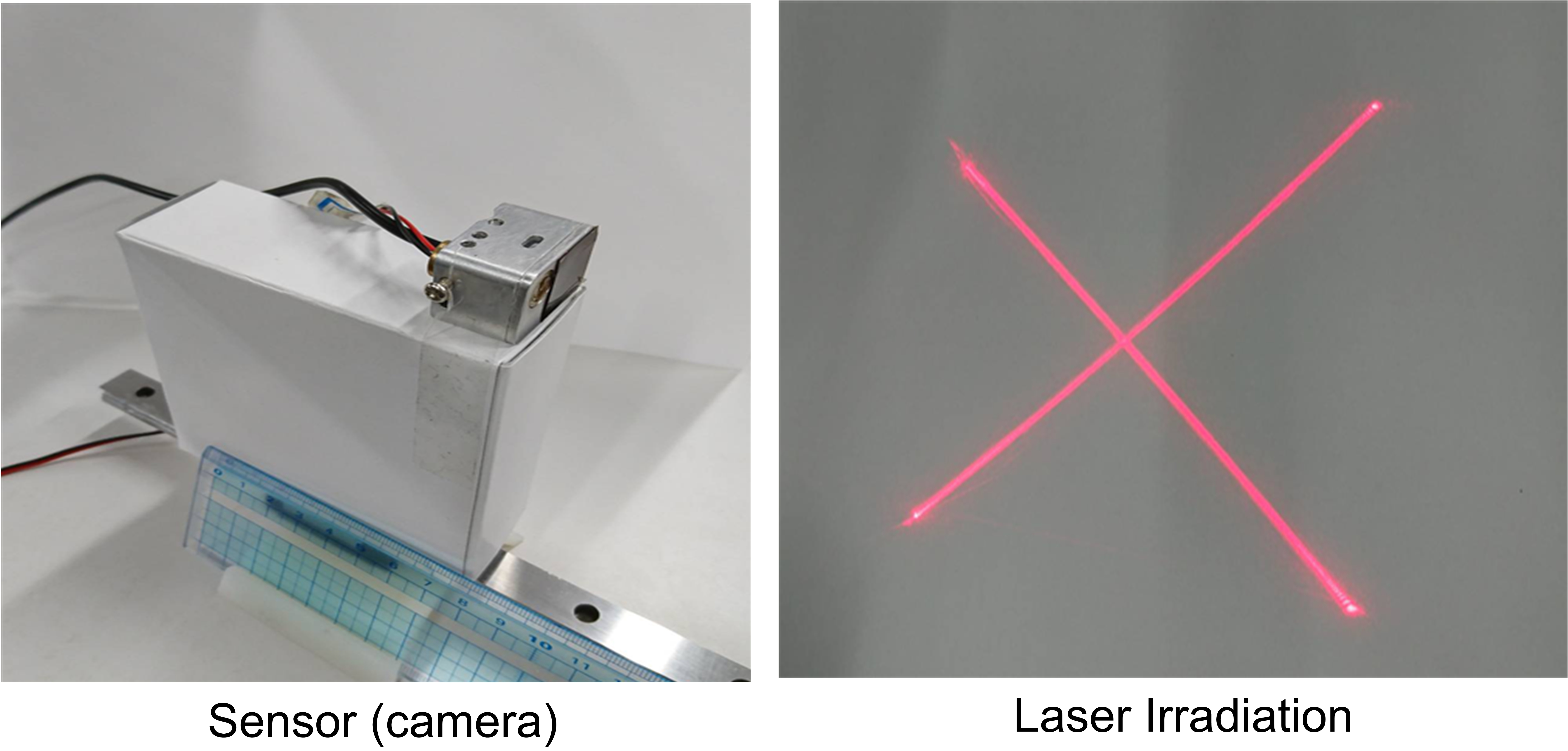
This is a sensor that acquires range images using Small USB Web Camera and Laser Pointer. Left figure shows the sensor. Right figure shows how a laser is irradiated on a white object. This laser is designed to output two lines which are illuminated. Therefore, the inclination of the irradiation surface (near the center) can be estimated with relatively high density.
Correction of color information of a 3D model using a range intensity image
In computer vision (CV), it's starting to expect for making real 3D model. It needed a lot of manpower and time to do modeling, because modeling previously was done by hand work. Therefore, it's expected an automation of modeling.
In our research, we make a high resolution 3D model with color information by mapping color images on the geometric model.
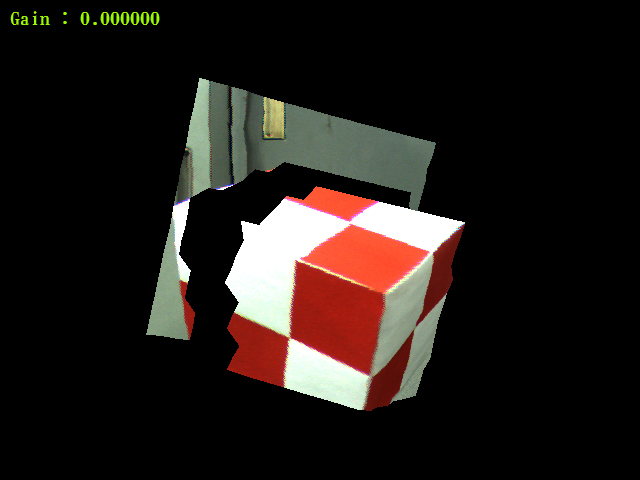
Real-time Sensing of Textured Range Images for Localization and Mapping
We constructed a range image sensor which consists of a commercially available multi-spot laser projector and two CCD cameras. And this high-speed range image sensor can obtain textured range images at real time.
The sensor can obtain range images at 100 Hz and the measurement range is 800-2000mm. As for the application of this sensor , we can obtain 3D-map with color texture using sequence of range images and color images. Our future work is to speed up the application.
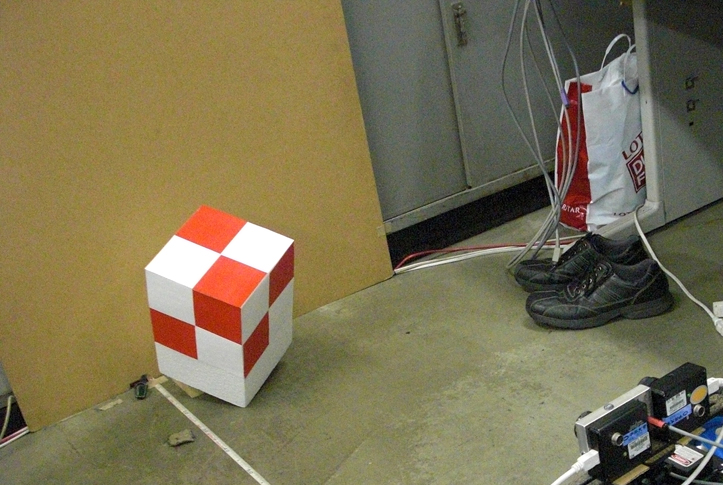
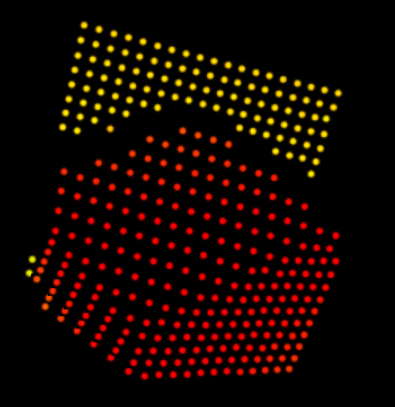
Range image sensing using multiple spotlights and stereo camera
A method of range image sensing by integration of active and passive methods using multiple spotlights is proposed.
The active stereo method using multiple spotlights can sense fast and robustly, but it has few measurement points.
The passive stereo method using stereo camera has many measurement points, but it cannot sense fast.
Using the information of active stereo sensing makes the measurement time of passive stereo sensing by a stereo camera shorter and makes its accuracy higher.
The effectiveness of the method is shown by experiments using a constructed range image sensor.
multiple spotlights and stereo camera
Copyright (C) 2004 Umeda Laboratory. All Rights Reserved