Mobile Robot Group
Three-dimensional target tracking with a mobile robot by fusion of tracking of two cameras
In our research, target tracking is one of the important functions for autonomous mobile robots. To realize this function, stereo cameras are often used. In a general stereo camera, a range image of the entire scene is acquired as precisely as possible, and the image is processed. On the other hand, in our research, processing is performed by individual cameras according to the requirements, and the results are integrated to acquire three-dimensional (3D) information of only necessary objects. 3D tracking of an object is a specific task. Object detection and tracking are performed by individual cameras, and the results are integrated to acquire 3D tracking information.High accurate range image generation by combination of TOF distance image sensor and stereo camera
This research proposes a system for measuring high precision range images under various conditions by combining range image sensors with different measurement principles. We utilize a stereo camera and a TOF (Time-of-Flight) range image sensor for our measuring system. Stereo cameras can measure relatively long range; however, measurement errors occur frequently. On the other hand, TOF sensors can provide relatively accurate distance measurements, but it cannot deal with under sunlight condition. In this respect, we develop a novel system that is able to generating a range image under any environment by sensor fusion. Experiment results demonstrate that the proposed system can generate the range image accurately.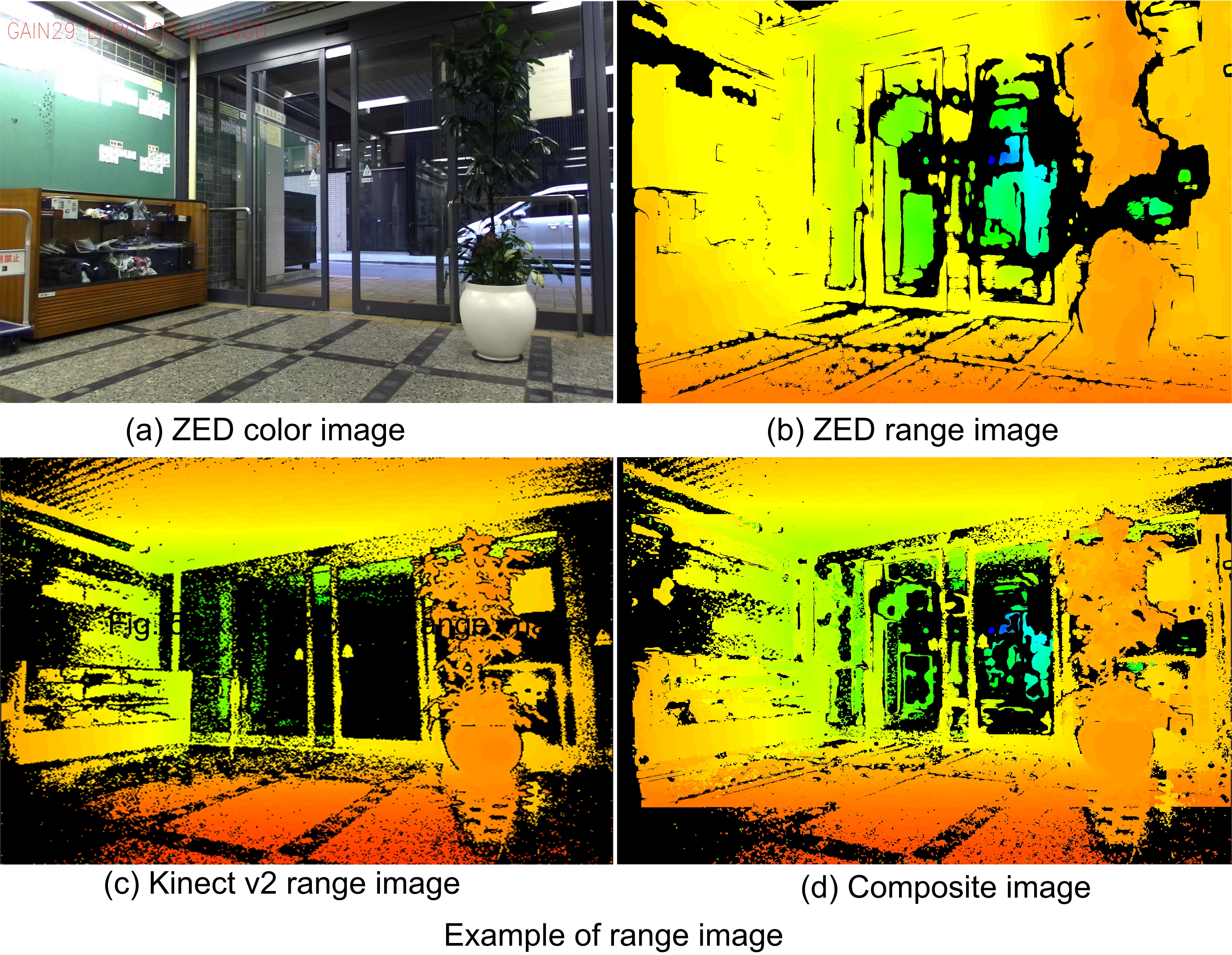 |
Obstacle detection of a biped robot
Detection of obstacles is important for a mobile robot that moves in a living space, especially for a biped robot that falls down even with a small obstacle. We make a compact range image sensor for detecting small obstacles on a plane. The sensor consists of a laser projector and a CCD camera, and measures a relative disparity map (RDMap) whose measurement errors are not affected by the distance. From the obtained RDMap, a plane is estimated and regions out of the plane are detected as obstacles. The system is suitable for detecting thin obstacles. And by using a multi-slit laser projector, the sensor can detect obstacles with small area. |
| Experimental results of obstacle detection by a walking biped robot |
| Obstacle Detection demo 겏demo( .wmv 6MB ) |
-Related papers-
Copyright (C) 2004 Umeda Laboratory. All Rights Reserved