マニュピュレーショングループ
物体を落とさず傷つけずに把持するための劣駆動ハンドの画像フィードバック制御
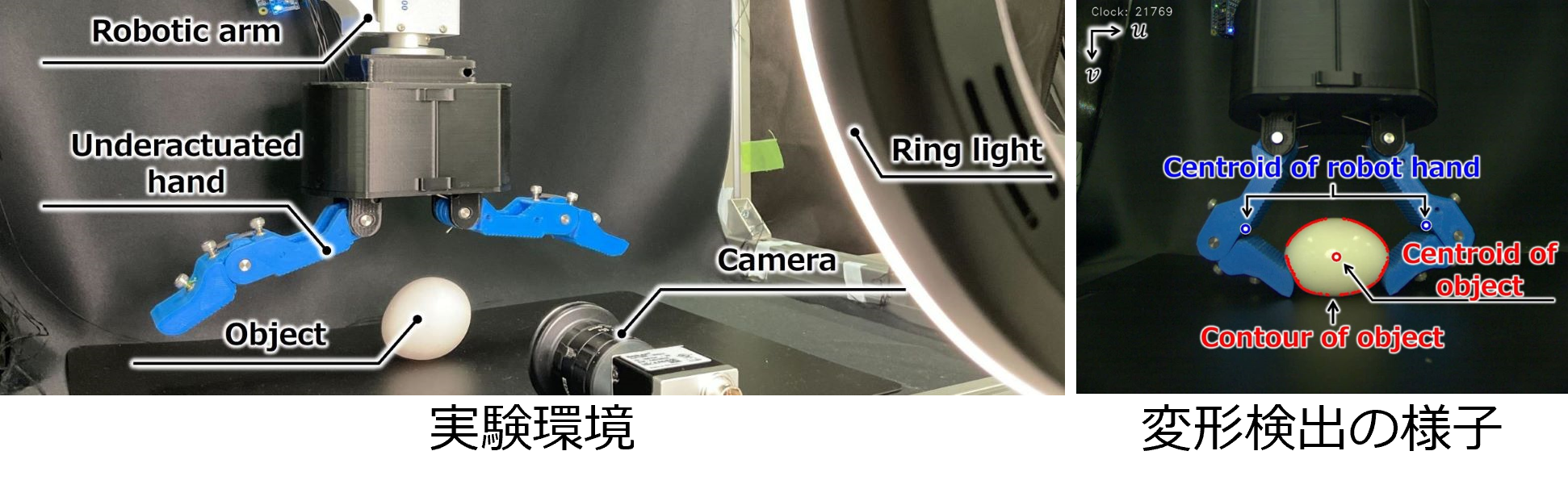
食品工場においてロボットの導入による自動化が進んでおり,食品を落とさず傷つけずに把持する必要がある.そのために物体形状になじむ劣駆動ハンドが注目されている.しかし劣駆動ハンドは把持状態のセンシングが困難であるという課題がある.
把持状態のセンシング手法として圧力センサや曲げセンサといった内界センサを用いたものがあるが,特定のロボットハンドに依存したシステムになってしまうほか,食品工場においては異物混入のリスクになるという課題がある.そこで本研究では,単眼カメラから取得した画像を用いて劣駆動ハンドと物体の状態をセンシングすることで,内界センサを用いずに把持状態を認識し,物体を落とさず傷つけずに把持する手法を提案する.
 |
Copyright (C) 2004 Umeda Laboratory. All Rights Reserved