全天球グループ
近年,全天球カメラと呼ばれる上下左右全方位の360度のパノラマ写真や360度動画の撮れるカメラが様々な業界で活用されています.
代表的なカメラとして,RICOH THETA[1]があります.
私たちは,全天球カメラの広範囲を撮影できるという強みを活かした「高精度な3次元計測」や「自立型ロボットのための自己位置推定」の研究を行っています.
 |
 |
| RICOH THETA |
3号館5階の360度写真 |
[1] RICOH THETAについて
3台の全天球カメラを用いた室内の高精度な3次元計測
ロボット技術が急速に発達したことにより,ロボットは普段の生活においてより身近で密接に関わるようになってきている.
周囲環境の認識が,ロボットが作業を行うための不可欠なタスクである.全天球カメラは,安価であり360 度撮を影可能なため多くの情報量が得られ,一度の撮影のみで計測可能である利点があるため,ステレオカメラにおいてカメラを全天球カメラに置き換えたシステムを設計した.
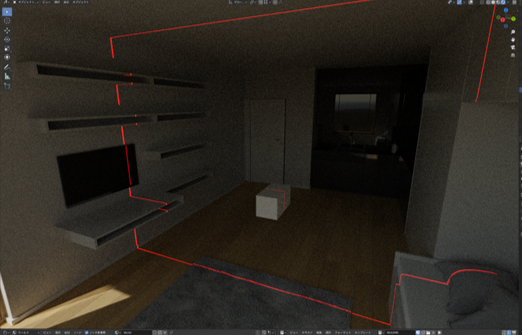
しかし,二眼全天球ステレオではエピポーラ線方向で精度低下と死角が発生してしまう課題があるため,三台目の全天球カメラを加えた新たな構成でのステレオ計測を行う.
 |
| 教室内の正距円筒画像 |
 |
| 3次元復元した教室 |
-関連論文-
全天球カメラと円周レーザを用いた室内の3次元計測
高精度な3次元計測技術は,大型設備のメンテナンスやインフラの保守運用において重要である.全天球カメラと円周レーザを用いて,高密度かつコスト面にも優れた機器・計測手法を提案した.
 |
 |
| 室内 |
円周レーザの照射 |
|
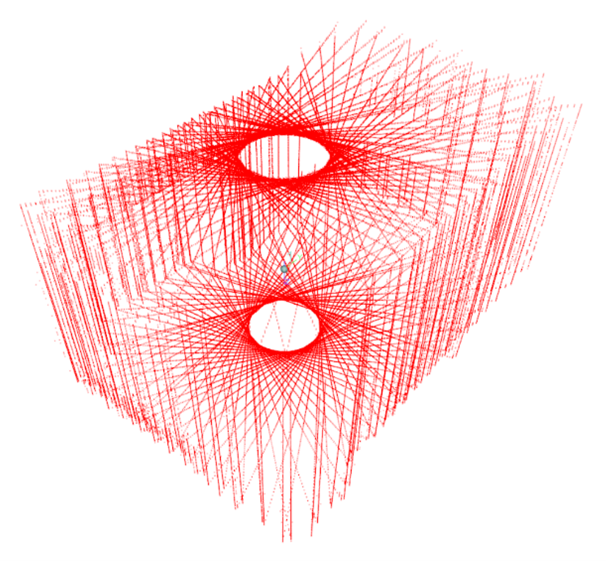 |
| レーザ光による室内の3次元形状 |
|
全天球カメラによるドアの高さ情報を用いた自己位置推定
近年,屋内の移動ロボットの利用が拡大しており,サービス,自動運転,インフラ点検,監視などにおいて活用が期待されている.
しかし,GPS(Global Positioning System)は,電波が届かない場所や反射してしまう場所において,ロボットが正しく観測されない可能性がある.
そこで,広範囲を撮影できる全天球カメラを用いて空間内のドアの検出を行い,事前に用意した「物体高さ情報を含む二次元地図」との類似度を比較することで,カメラの位置推定を行う.
 |
| 深層学習を用いたドア検出 |
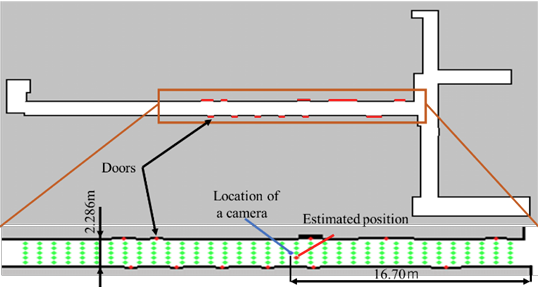 |
| 事前地図 |
-関連論文-