魚眼グループ
自律型ロボットや自動車等の運転支援システムにおいて,一度に広範囲を3 次元計測することが重要です.そこで我々は3次元計測を行うセンサとして魚眼カメラを用いて様々な研究を行っています.一度に広範囲を計測できることや自動車等への搭載が容易であることが魚眼カメラの利点として挙げられます.
魚眼カメラの内部パラメータ推定手法
魚眼カメラを計測に用いるには厳密な内部パラメータを必要とする場合が多くあります.そこで簡便かつ高精度に内部パラメータを得る研究を行っています.魚眼カメラを水平面上で回転させ,3次元空間中の特徴点軌跡の形状から内部パラメータを推定する手法を提案しています.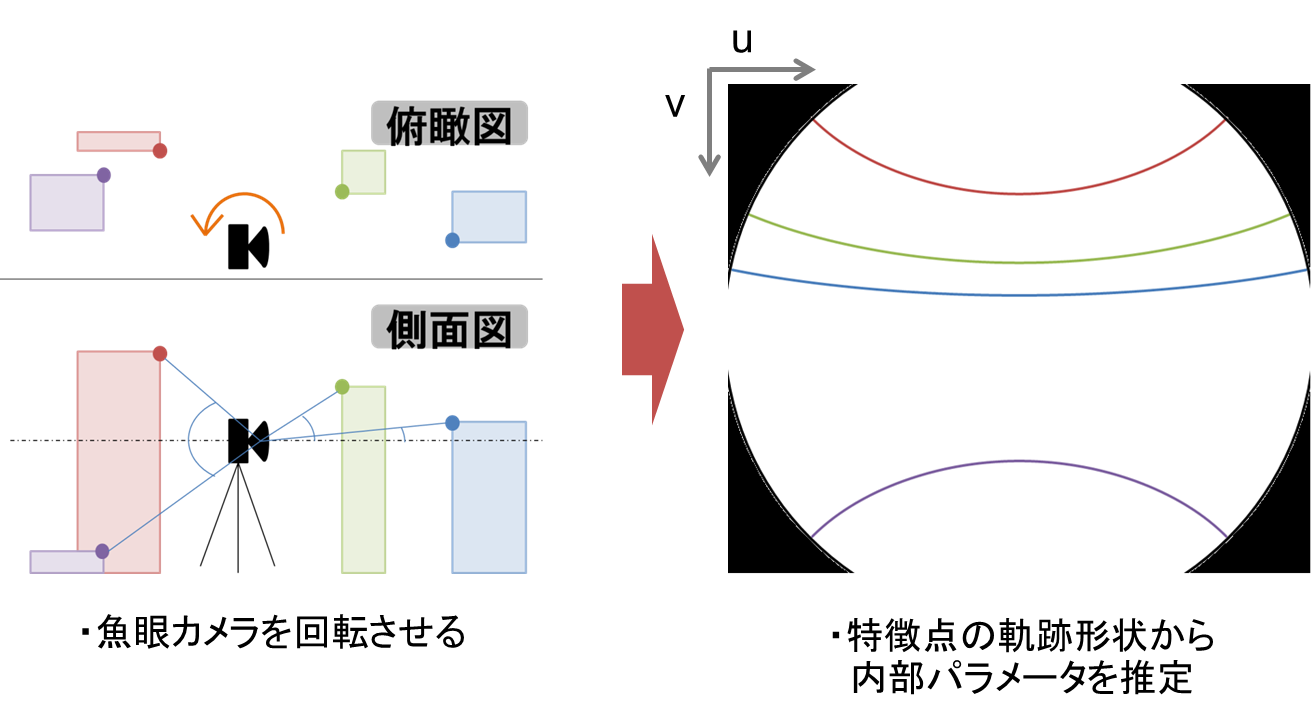 |
- 菱木暁彦, 梅田和昇, "カメラの回転を利用した魚眼カメラの内部パラメータ推定," 動的画像処理実利用化ワークショップDIA2018講演論文集, OS2-2, pp. 27-31, March 2018.
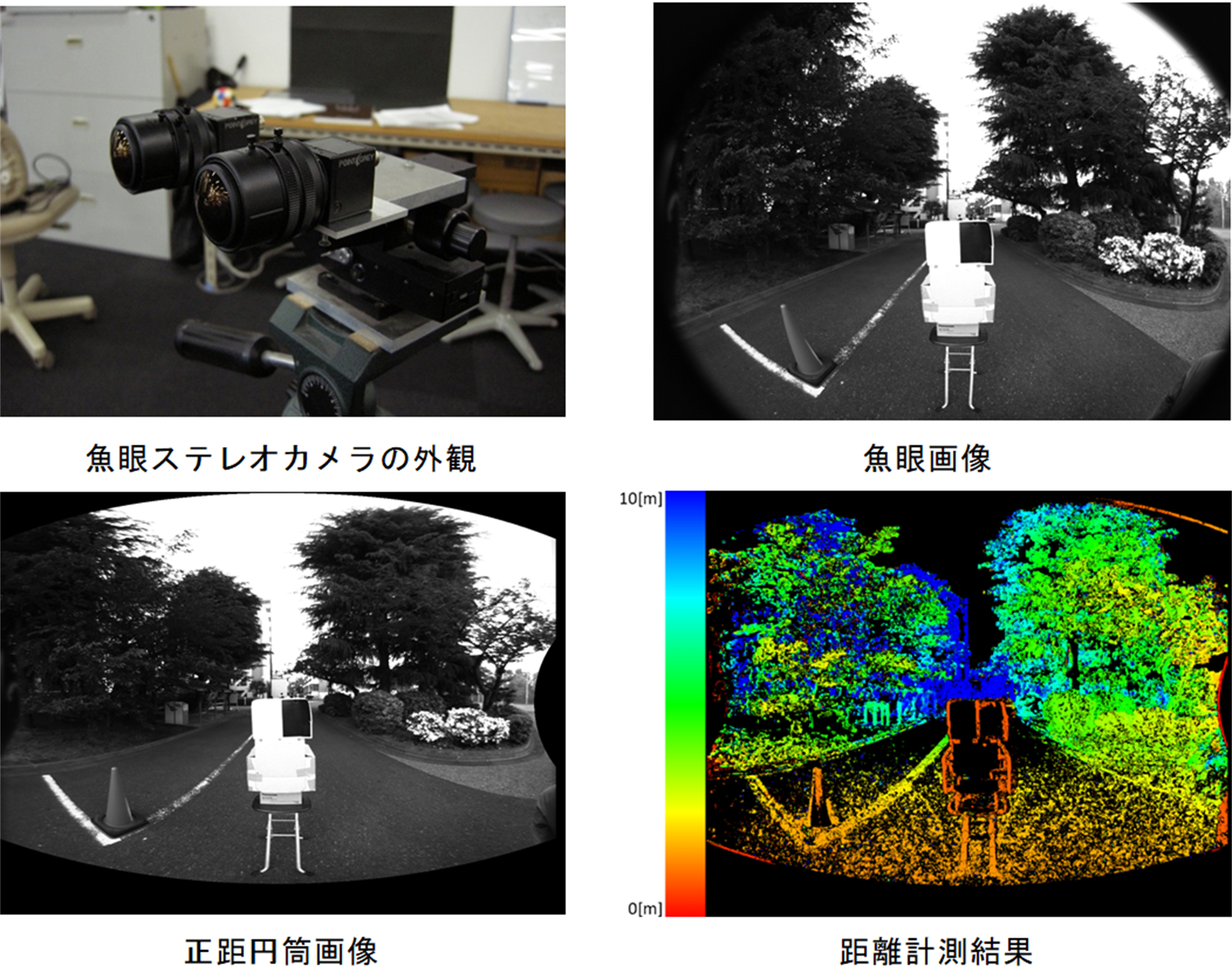
魚眼ステレオカメラを用いた距離計測手法
車に搭載するセンサは交通事故の防止のため,広範囲の距離情報を計測可能であることが求められています.そこで,魚眼ステレオカメラを用いて広範囲の距離計測を行う研究を行っています.魚眼ステレオカメラで撮像した魚眼画像を歪みの少ない正距円筒画像に変換することで画像端におけるステレオマッチングを簡単化させ,広範囲の3次元計測を行う手法を提案しています.
 |
-関連論文-
- 大橋明, 山野史登, 増山岳人, 梅田和昇, 福田大輔, 入江耕太, 金子修造, 村山純哉, 内田吉孝, "正距円筒画像への変換を用いた魚眼ステレオカメラの構築," 精密工学会誌, Vol. 83, No. 12, pp. 1095-1100, December 2017.
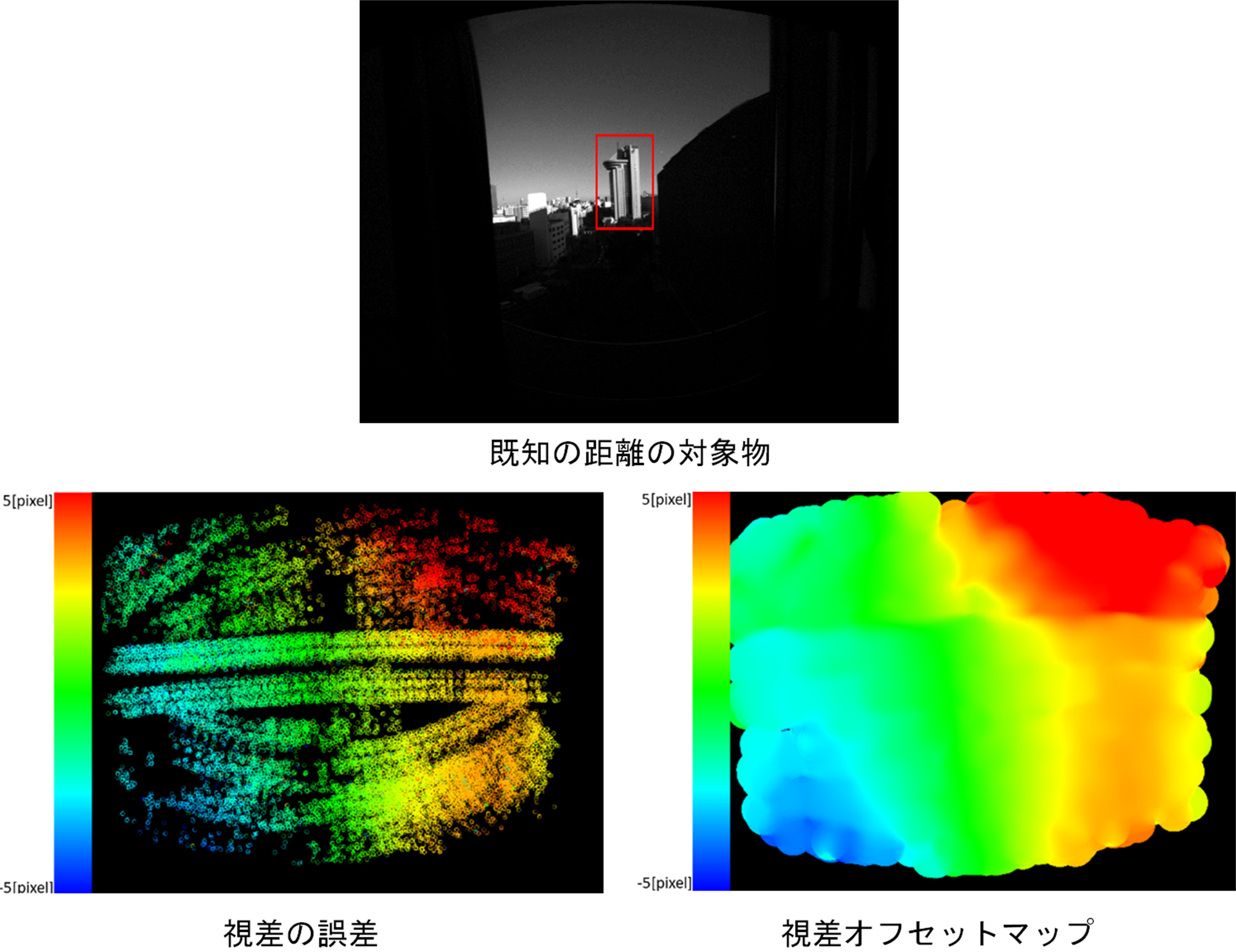
視差オフセットマップによる魚眼ステレオカメラの高精度化
ステレオカメラ等で計測する際,その結果に含まれる誤差は事前に行うカメラキャリブレーションの精度に依存する.そこで,本研究では既知の距離の対象物から得られた特徴点の視差を用いた補正方法を提案している.真値に対する視差の誤差を計算し,それを元にして全画素に対して視差誤差を求めた視差オフセットマップを作成する.そして,そのマップの誤差をキャンセルするように画像変換してからステレオマッチングを行うことで不十分なカメラキャリブレーションによる誤差を低減している.
 |
-関連論文-
- 山野史登,飯田浩貴,梅田和昇, 大橋明,福田大輔,金子修造,村山純哉,内田吉孝, "視差オフセットマップによる魚眼ステレオカメラの高精度化," 2018年度精密工学会春季大会学術講演会論文集, D74, pp.271-272,March 2018.
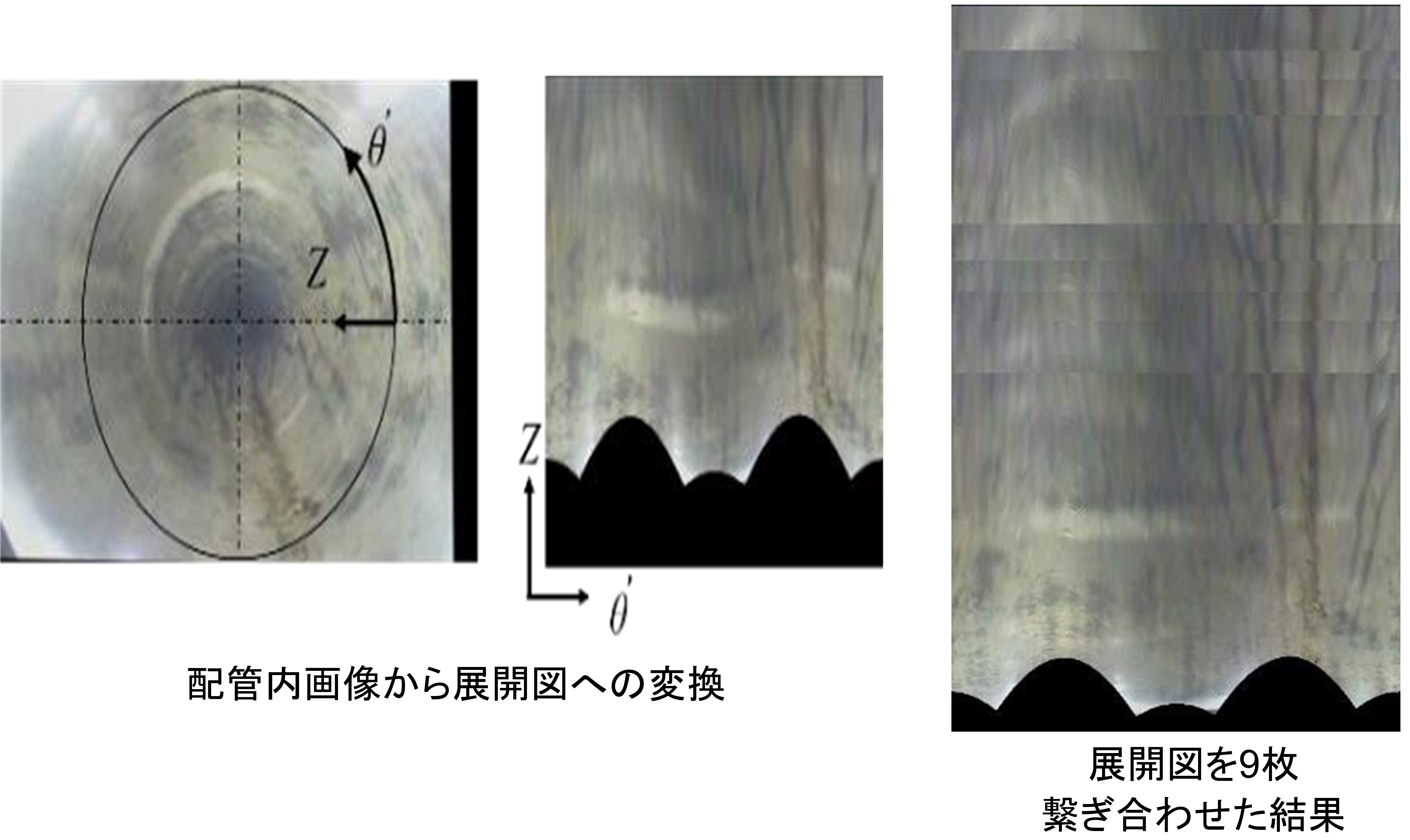
配管内画像からの3次元地図生成
近年の配管の老朽化により道路崩壊などの危険性が増している.これらの事故を防止するためには,配管内画像から精密な検査を行えるシステムを構築することが有効であると思われる.そこで,本研究では広角カメラで撮られた配管内画像から展開図を作成し,カメラの運動情報を元に展開図を繋ぎ合わせる手法を提案している.
 |
-関連論文-
- 田中宏樹, 山野史登, 菱木暁彦, 梅田和昇, 石川龍太郎, 眞野雄貴, 中村太郎, "配管内画像からの3次元地図作成," 2018年度精密工学会春季大会学術講演会論文集, ロボティクス・メカトロニクス講演会2018論文集, 1A1-I05, pp. 12, June 2018.
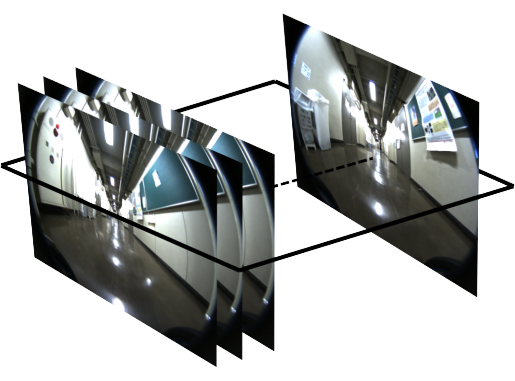
単眼魚眼カメラを用いた3次元環境復元
複数枚の画像を時系列に並べた,時空間画像というものを用いて単眼の魚眼カメラから3次元環境を復元します.超広角な魚眼カメラは,広範囲の計測が可能な為,低コスト化に繋がり車などへの搭載性にも優れます.
本研究では,カメラを移動ロボットに搭載し,周囲の環境計測を行います.そして魚眼レンズの特殊な歪みを考慮して,3次元環境の復元を行っています.
-関連論文-
本研究では,カメラを移動ロボットに搭載し,周囲の環境計測を行います.そして魚眼レンズの特殊な歪みを考慮して,3次元環境の復元を行っています.
 |
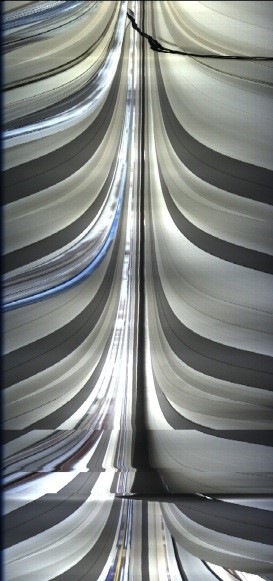 |
| 取得する複数枚画像 | 魚眼を用いた時空間画像 |
校正マーカーを用いた複数魚眼カメラの外部パラメータ推定
ドライバーが車両の周辺を確認しやすくするためのシステムの1つに車両を真上からみたような画像(俯瞰画像)をドライバーに提示するシステムがあります.
これは車両に取り付けられた複数台の魚眼カメラから得られる各画像を真上からみたような形に変換し,それらを合成することで全周囲の俯瞰画像を得ています.この際,魚眼カメラが取り付けられている位置や姿勢(外部パラメータ)を正確に把握することが必要です.
そこで本研究では,形状が既知である校正マーカーを車両の周囲に配置し,画像中の校正マーカーの形状から複数台の魚眼カメラの外部パラメータを推定する手法を提案しています.
-関連論文-
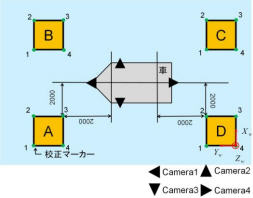 |
| 校正環境 |
Copyright (C) 2004 Umeda Laboratory. All Rights Reserved