画像処理グループ
魚眼カメラによる時空間画像を用いた3次元環境復元
複数枚の画像を時系列に並べた,時空間画像というものを用いて単眼の魚眼カメラから3次元環境を復元します.超広角な魚眼カメラは,広範囲の計測が可能な為,低コスト化に繋がり車などへの搭載性にも優れます.本研究では、カメラを移動ロボットに搭載し,周囲の環境計測を行います.そして魚眼レンズの特殊な歪みを考慮して,3次元環境の復元を行います.今後は、更なる高精度の復元を目指し,ドライバーへの運転支援や移動ロボットの自律移動へと繋げていきたいと考えています.
 |
| 魚眼画像 | 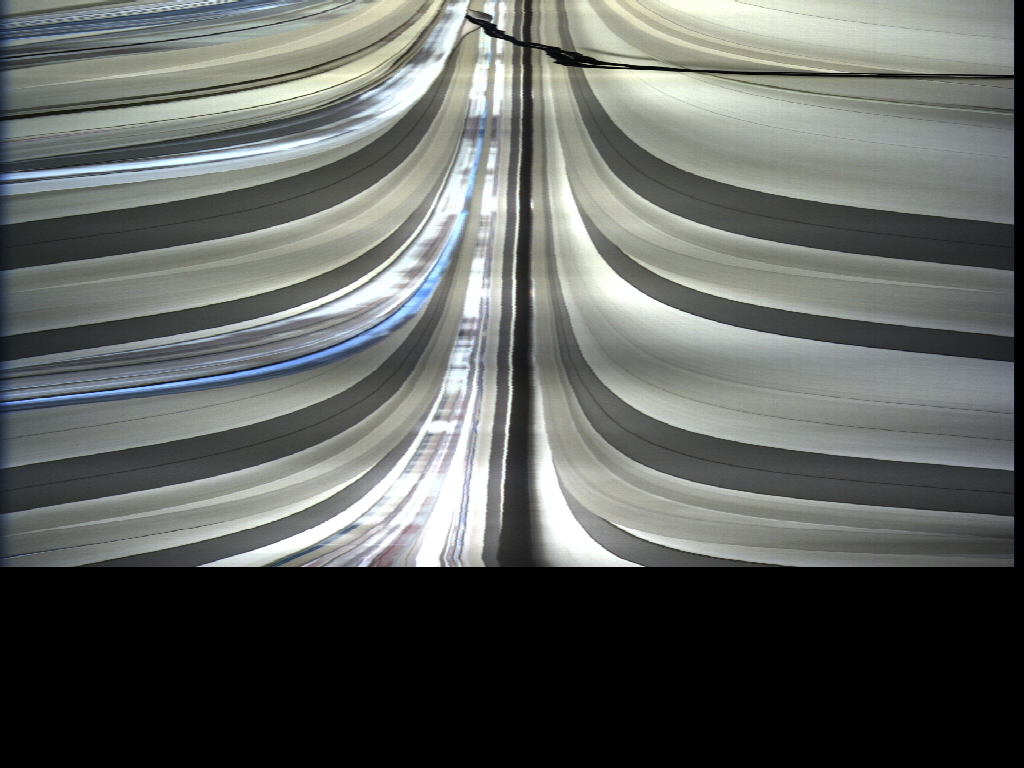 |
| 魚眼を用いた時空間画像 |
Copyright (C) 2004 Umeda Laboratory. All Rights Reserved