3Dグループ
ぼけを利用したスリット判別による距離画像センサの計測範囲拡大
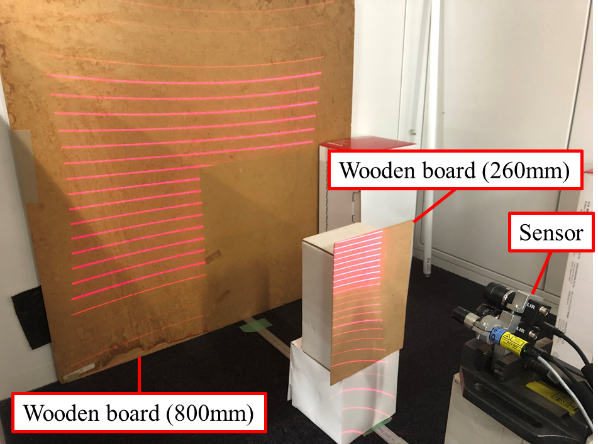
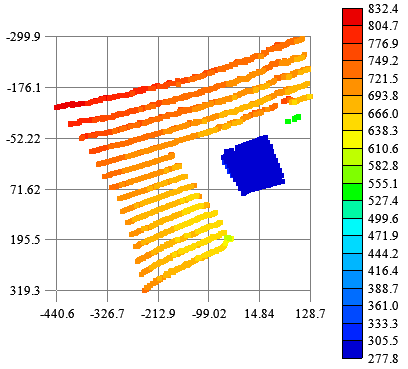
本研究では,モノクロカメラと15本のスリット光を照射するレーザプロジェクタを用いて,距離画像を取得します.従来研究では対応点問題を回避するために計測範囲を限定していましたが,ぼけを利用してスリット判別をすることで対応点問題を緩和し,計測範囲を拡大することを検討しています.
計測環境
取得した距離画像
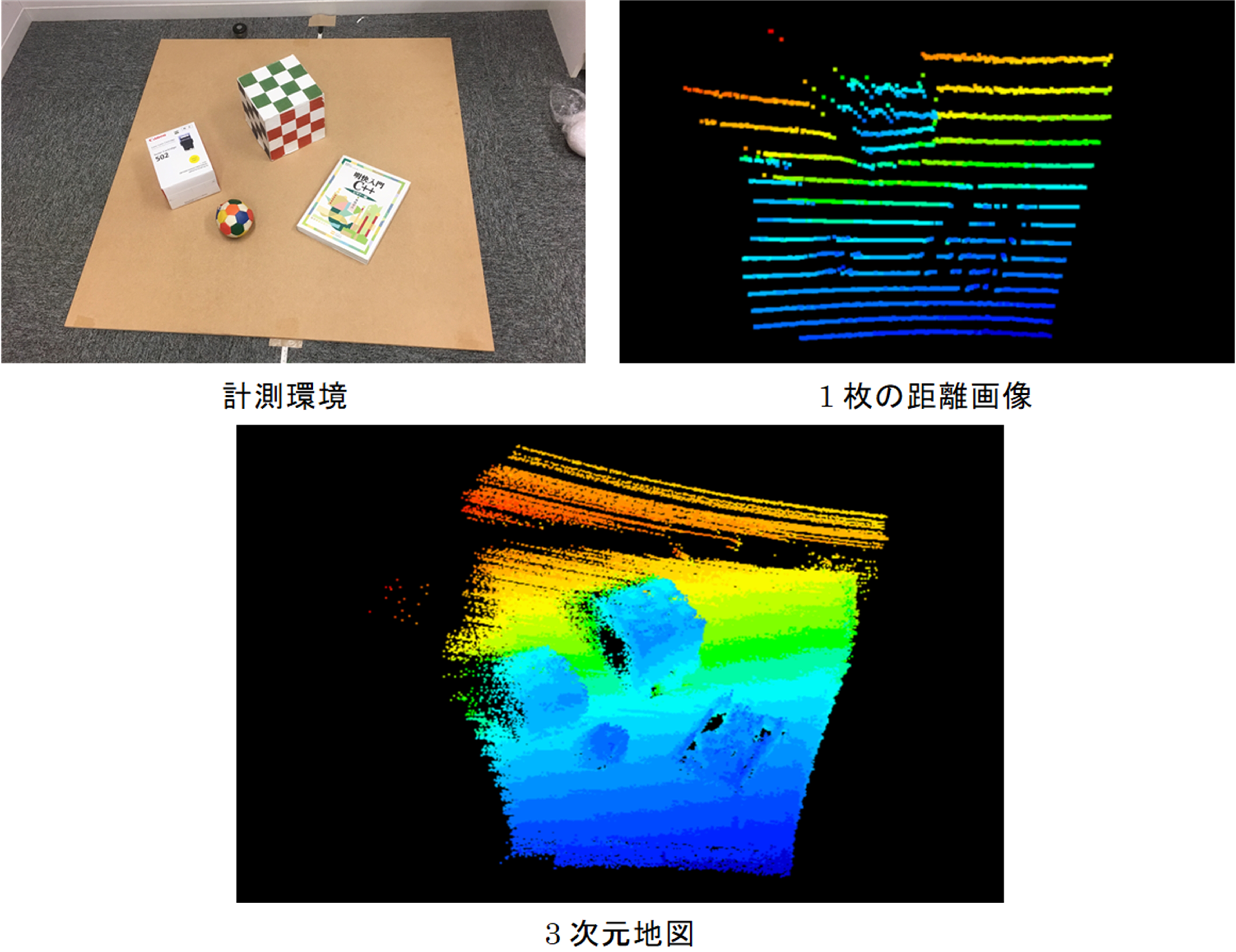
マルチスリットレーザプロジェクタを用いた距離画像センサによる3次元地図生成
距離画像センサから得られた距離画像を複数枚重ね合わせることで,あるシーンの3次元の地図を生成することが可能です.本研究では,距離画像やカラー画像を基にした運動パラメータの拘束式を用いて距離画像センサの運動パラメータを推定し,得られた運動パラメータを用いて距離画像の位置合わせを行い3次元の地図を生成しています.今後,3次元地図生成の精度向上や高速化を検討しています.
-関連論文-
木村 優志, 増山 岳人, 梅田 和昇, "マルチスリットレーザプロジェクタを利用した距離画像センサを用いた微小運動の直接推定による三次元地図生成," 日本機械学会ロボティクス・メカトロニクス講演会2017講演論文集, 2A2-N10, May 2017.
TOF距離画像センサとステレオカメラの組み合わせによる高精度距離画像計測
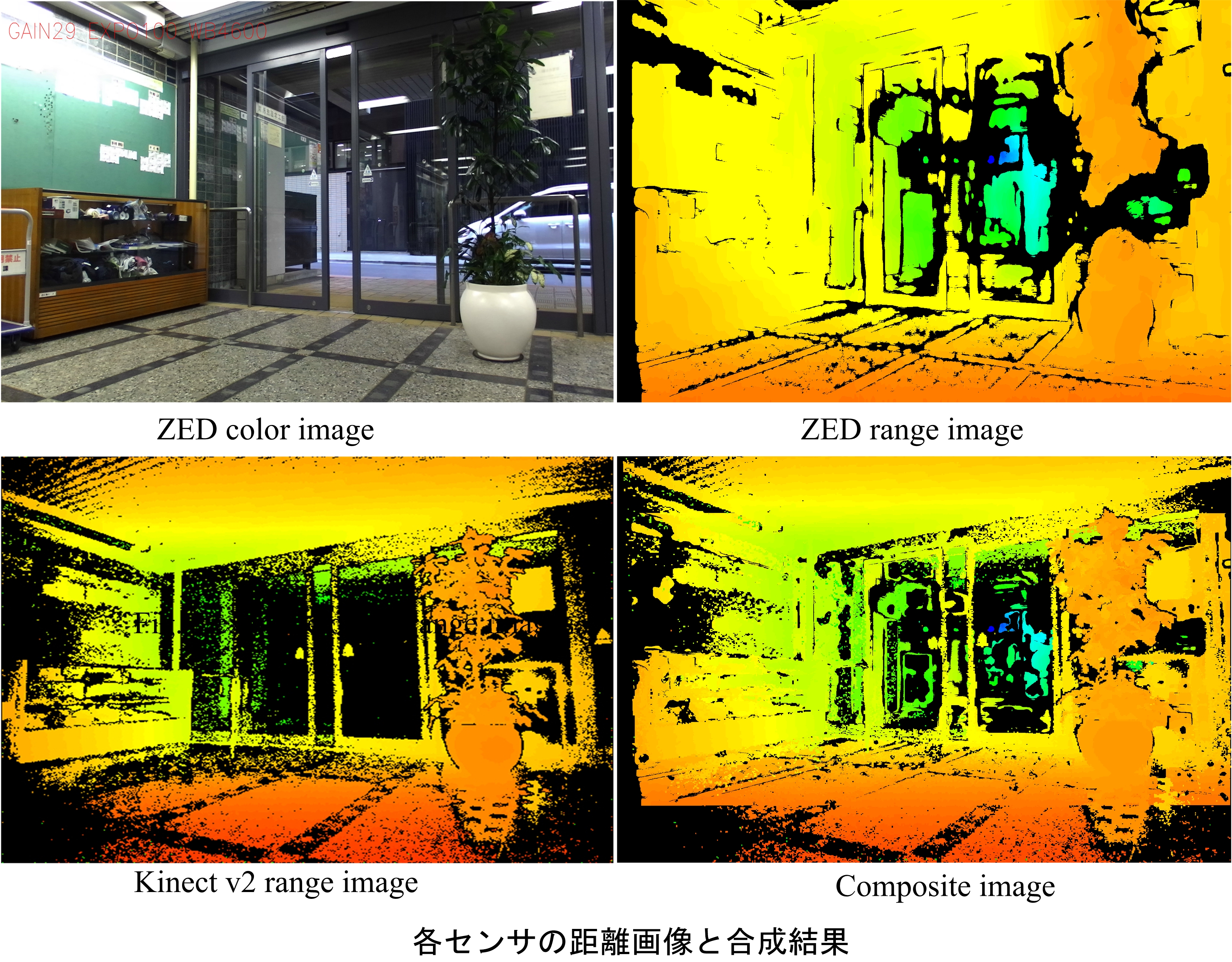
今日,様々な距離画像センサが開発されています.それらのセンサには,計測手法ごとに計測を苦手とする環境や対象が存在します.本研究では,ステレオカメラとTime of Flight方式距離画像センサを組み合わせることで,照明環境や計測対象の変化に頑強な計測手法を提案します.カラー画像から照明環境や計測対象の特性を判別し,双方のセンサから得られる距離画像の画素ごとに重み付けを行います.その後,双方の距離画像を比較し外れ値の除去を行ったのち合成をすることで,多様な環境や対象で高密度,高精度な距離画像を取得します.
-関連論文-
福田 智章, 梅田 和昇, "異なる距離画像センサの組み合わせによる高精度計測," 第18回計測自動制御学会システムインテグレーション部門講演会講演論文集, 1C2-06, pp. 600-602, December 2017.
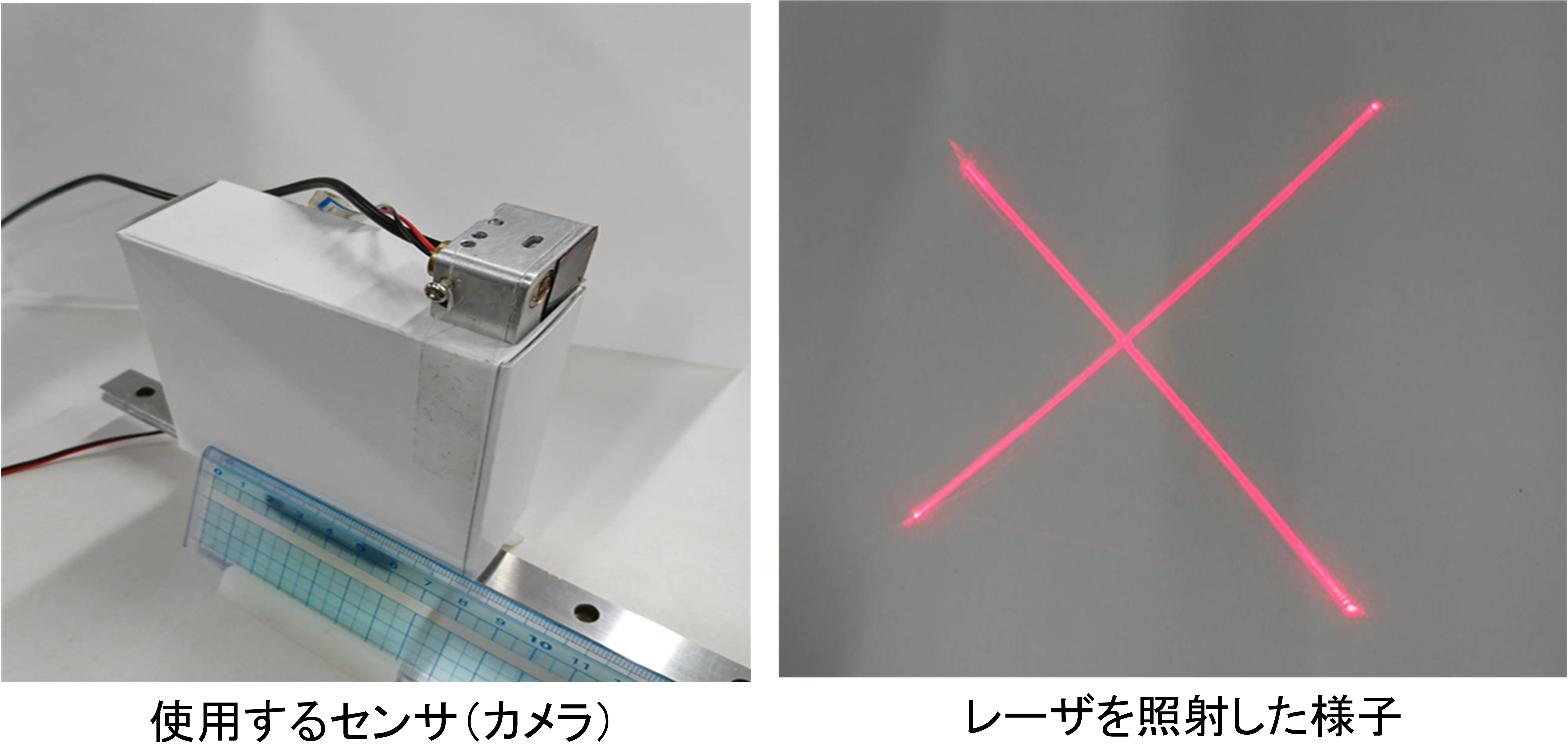
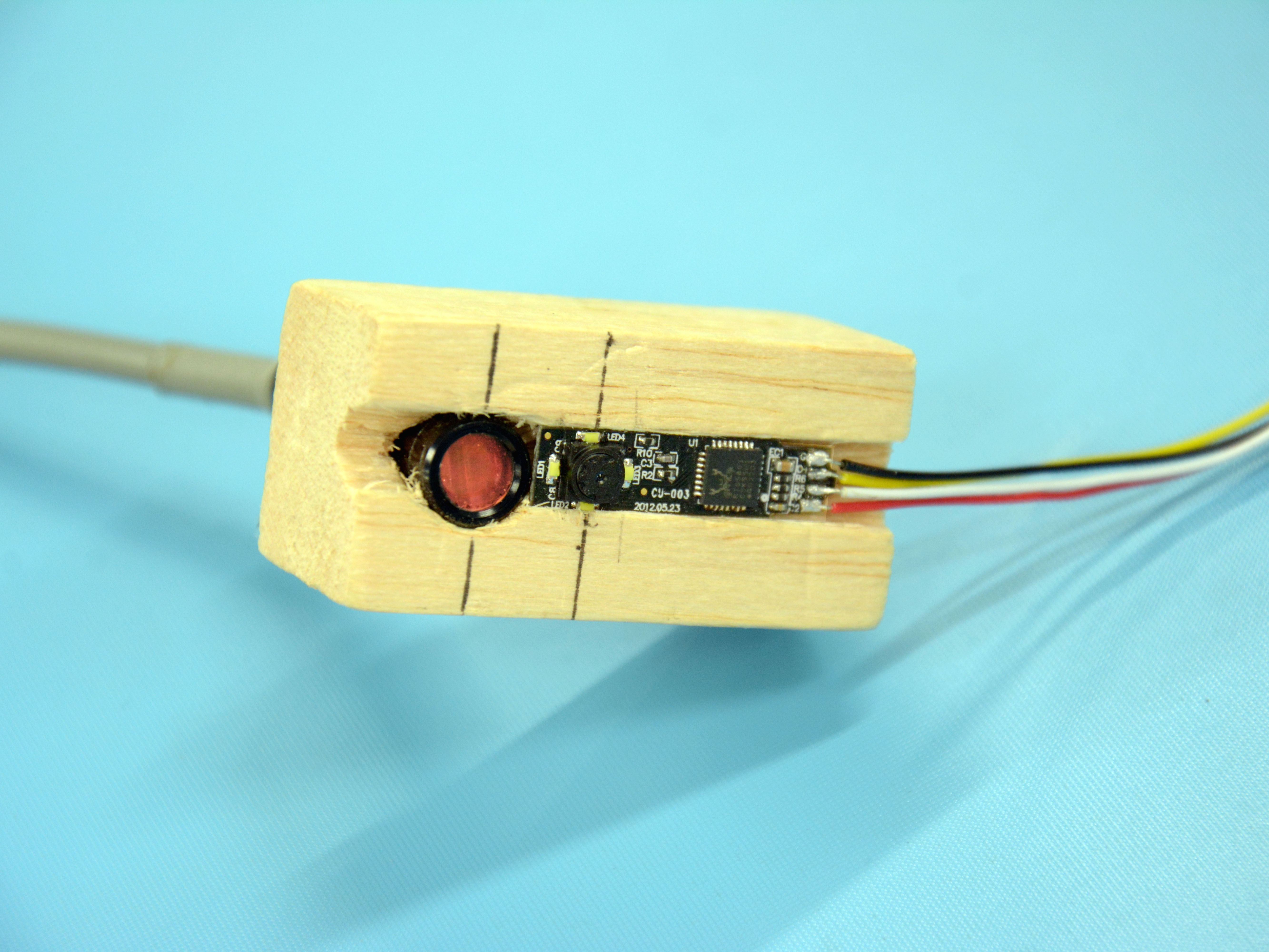
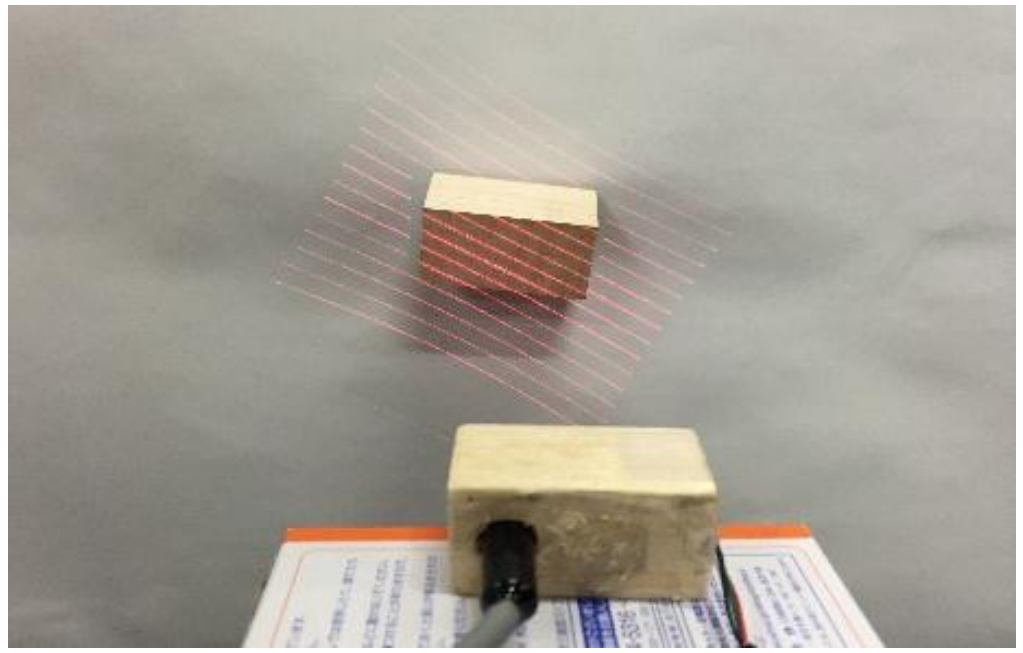
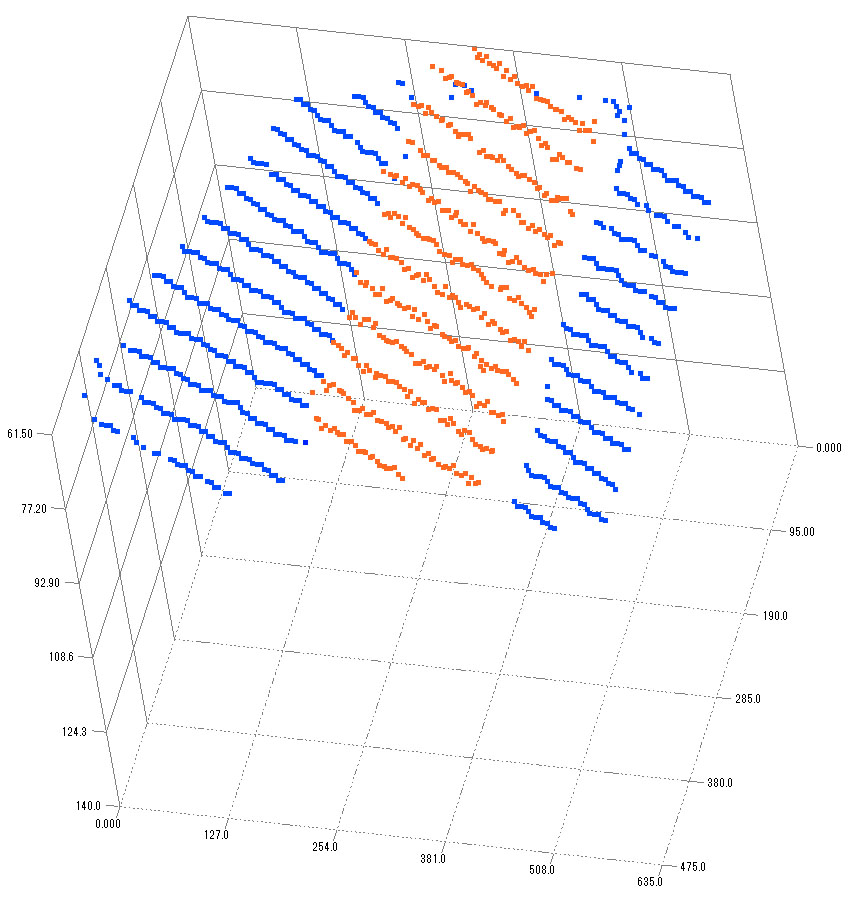
小型距離画像センサ
小型カメラ(USB WEBCAM)とクロスラインレーザポインタを用いて距離画像を取得するセンサを製作します.左の図に使用するセンサ(カメラ+レーザ)を示します.また,右の図はレーザを白い物に照射した様子で,このレーザは2本のラインを出力するように設計されています.2本のレーザが平行でない角度で照射されるから,照射面(中央付近)の傾きが比較的高密度で推定できます.
マルチスポット光を用いたテクスチャ付き距離画像計測システム
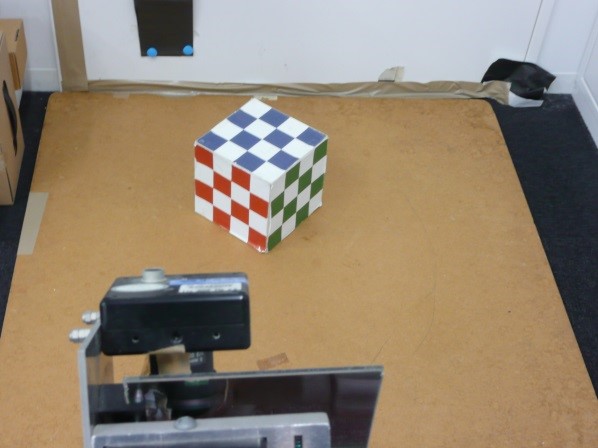
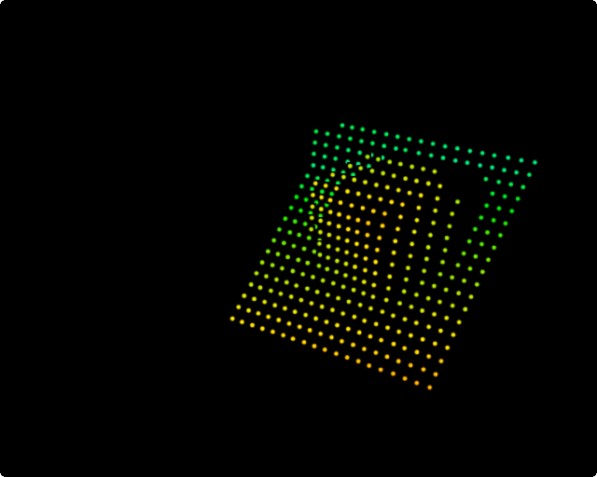
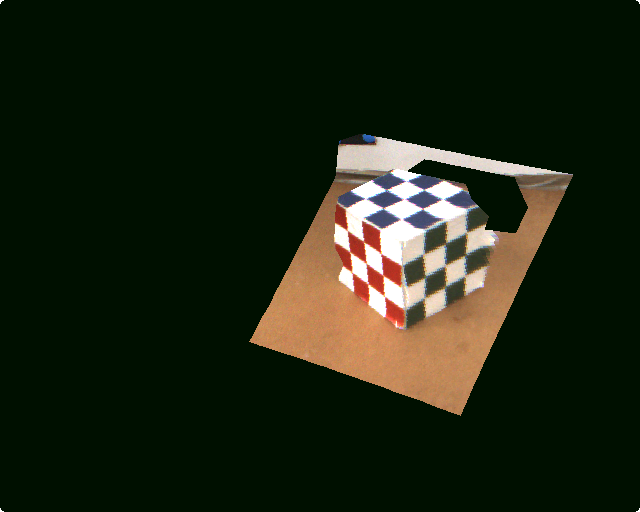
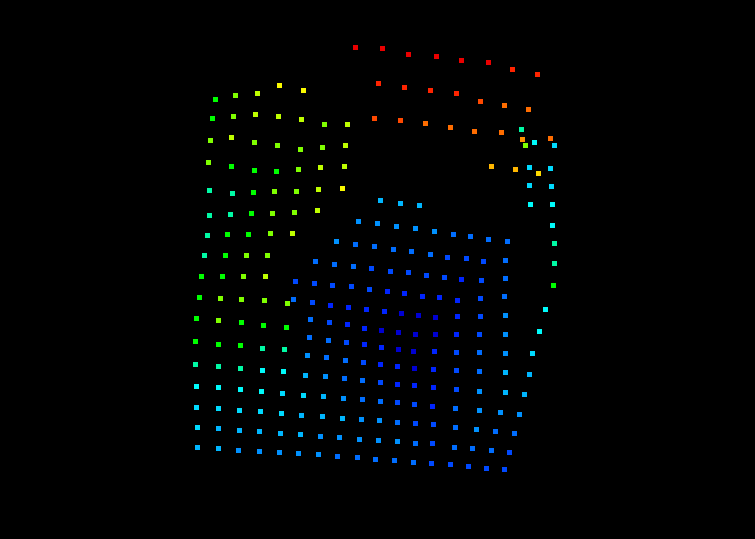
本研究ではモノクロカメラと19×19の点群を照射するレーザプロジェクタを用いて,対象の距離画像を高速に取得することができます.さらに,カラーカメラから取得したカラー画像をテクスチャマッピングすることで,高速にテクスチャ付き距離画像を取得することが可能です.
計測環境
取得した距離画像 テクスチャ付き距離画像
-関連論文-
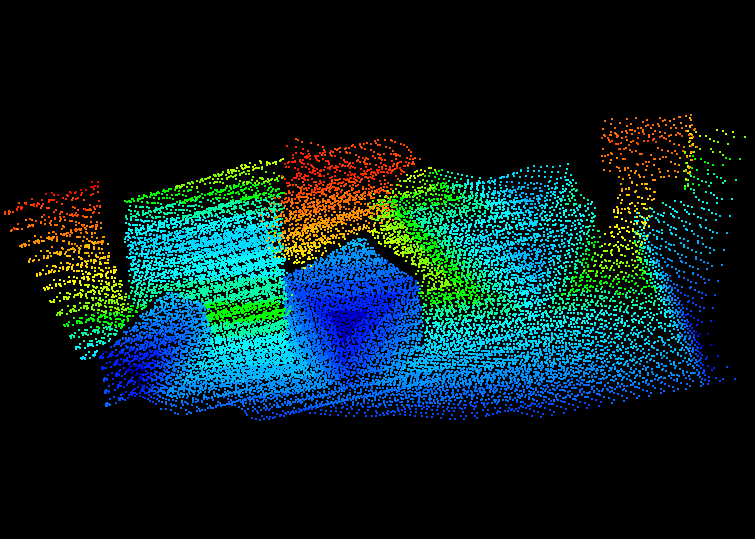
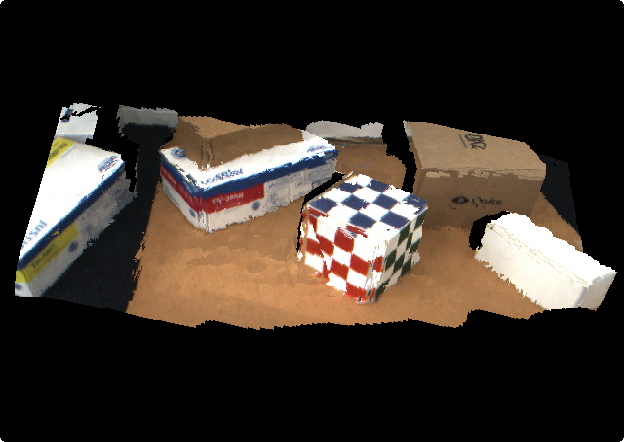
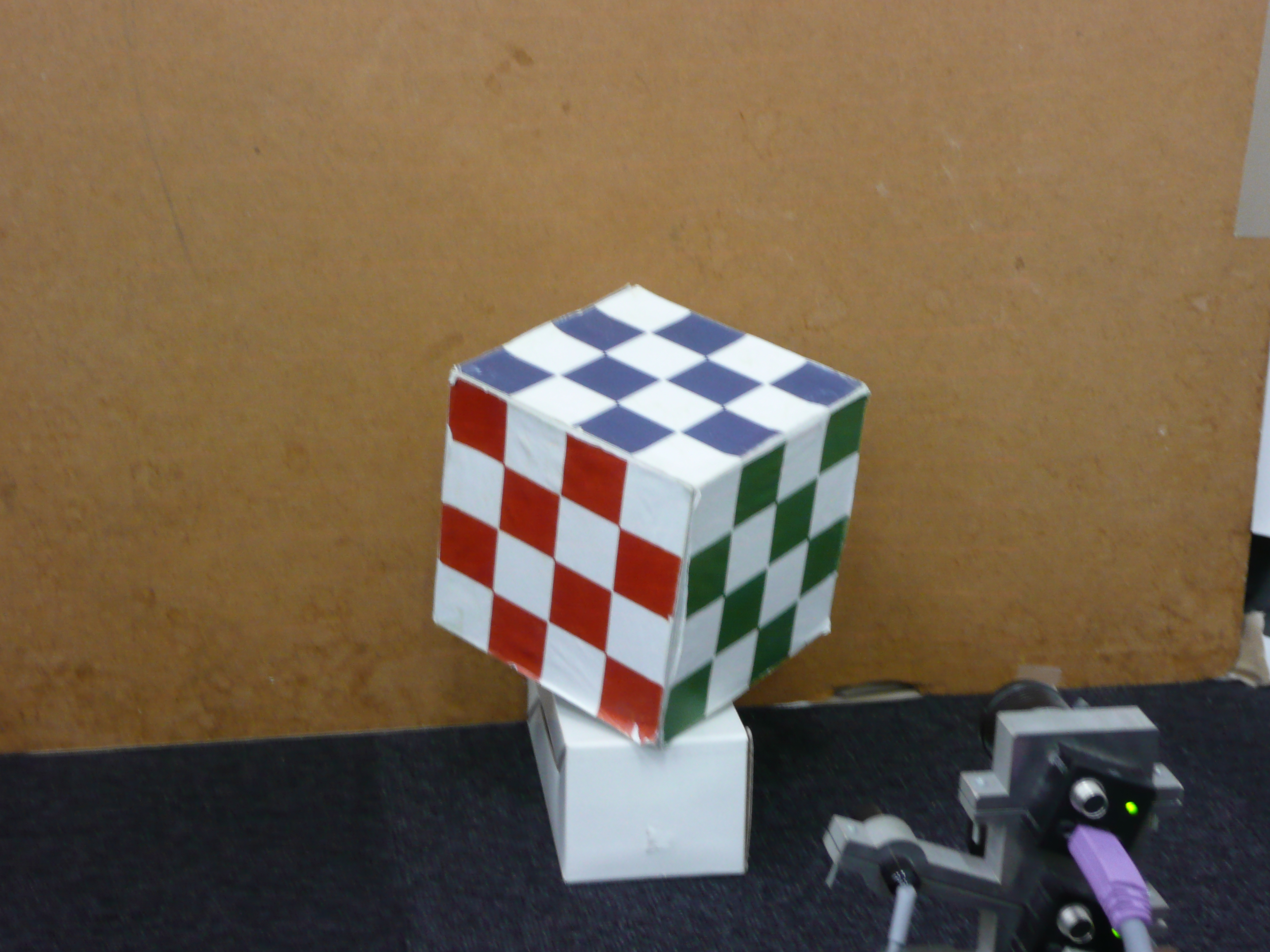
マルチスポット光を用いた距離画像センサによる三次元地図生成
距離画像センサから得られた距離画像を複数枚重ね合わせることで,あるシーンの三次元の地図を生成することが可能です.本研究では,距離画像やカラー画像を基にした運動パラメータの拘束式を用いて距離画像センサの運動パラメータを推定し,得られた運動パラメータを用いて距離画像の位置合わせを行い三次元の地図を生成しています.
計測環境
1枚の距離画像 3次元地図
テクスチャ付き3次元地図
-関連論文-
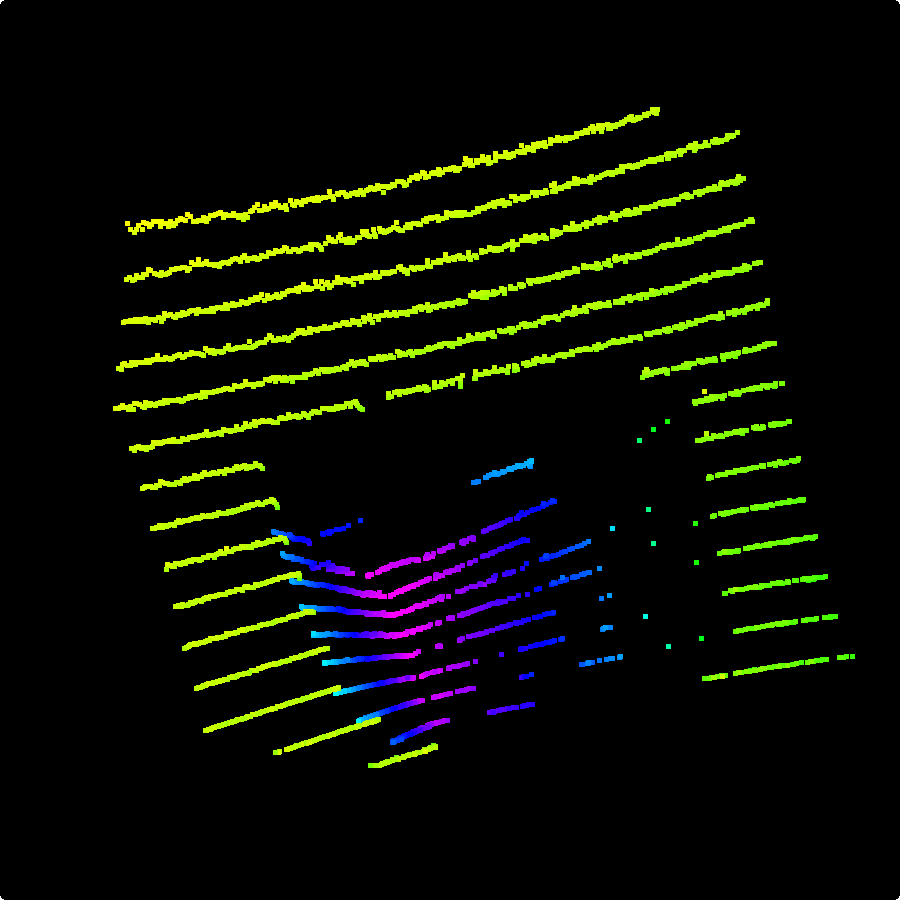
マルチスリット光を用いた距離画像計測システム
本研究ではモノクロカメラと15本の線を照射するレーザプロジェクタを用いて,対象の距離画像を取得することができます.レーザ光に点群ではなく線を使用することにより,密な距離画像を計測することが可能です.今後,カラーカメラから取得したカラー画像を用いたテクスチャマッピングや距離画像の取得の高速化を検討しています.
計測環境
取得した距離画像
-関連論文-
マルチスリットレーザプロジェクタとカメラを組み合わせた超小型距離画像センサ
本研究では小型カメラとレーザプロジェクタを用いて,超小型かつ近距離での計測が可能です.ロボットハンドの手先に搭載可能な距離画像センサの構築を目的としています.
工業用カメラ、内視鏡用カメラなどでセンサを組み合わせて,ロボットに設置しやすいより軽くコンパクトな距離画像センサを作る研究です.このセンサは50mmから150mmの計測範囲において約2000点の距離画像を取得できます.今後は更に近距離の距離計測と高速化を検討しています.
-関連論文-
距離濃淡画像の利用による高精度な3Dモデル生成
コンピュータグラフィックス(CG)などの分野を始めとして,高精度な3Dモデルを復元することに対する需要が高まっています.高精度な3Dモデルを復元するためには,センサなどを用いて計測した実物体の形状や色情報を用いることでリアルな3Dモデルを復元することができます.しかし3Dモデルを復元する過程には人の手による作業や時間が必要となるため,生成プロセスの自動化や簡略化が望まれています.我々はセンサによって得られる実物体の3D形状にデジタルカメラによって得られるカラー画像を張り合わせることで,色情報付きの3Dモデルを生成しています.本研究では,3Dモデルの生成におけるプロセスの自動化や,リアリティ追求のための色情報の推定などの研究を中心に行っています.
実写画像
生成モデル
動画を再生することができませんでした。
-関連論文-
3D応用グループ
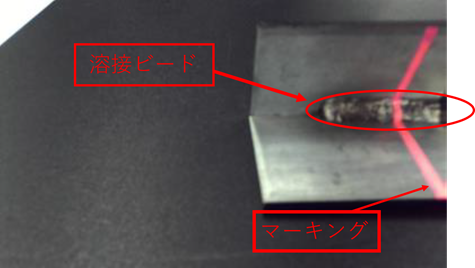
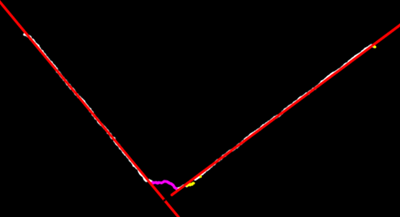
ステレオカメラを用いた溶接ビードのマーキング箇所の断面形状推定
本研究では,ステレオカメラを用いた溶接ビード検査システムを提案する.一般的に溶接ビードの検査には,専用の測定器やレーザ光を用いた溶接検査ツールが用いられている.しかし,レーザ光を用いた溶接検査ツールでは, 測定物の表面が鏡面に近いほど計測精度が低下するという問題がある.そこで,提案するシステムでは,任意の溶接箇所でマーキングを行う.その後,小型のステレオカメラを用いてマーキング箇所の溶接ビードを検査する.三角測量の原理を利用してマーキング部の三次元情報を取得し,溶接ビードの接合具合を評価する.実験により提案手法の有効性を示している.