宇宙トイレ:有人・微小重力環境下での排泄物搬送
関連研究:
固体ロケット蠕動運動ポンプ型ロボット
粉体搬送蠕動運動ポンプ型ロボット
土砂搬送蠕動運動ポンプ型ロボット
神経ネットワークによる蠕動運動型ポンプの知能化
研究目的
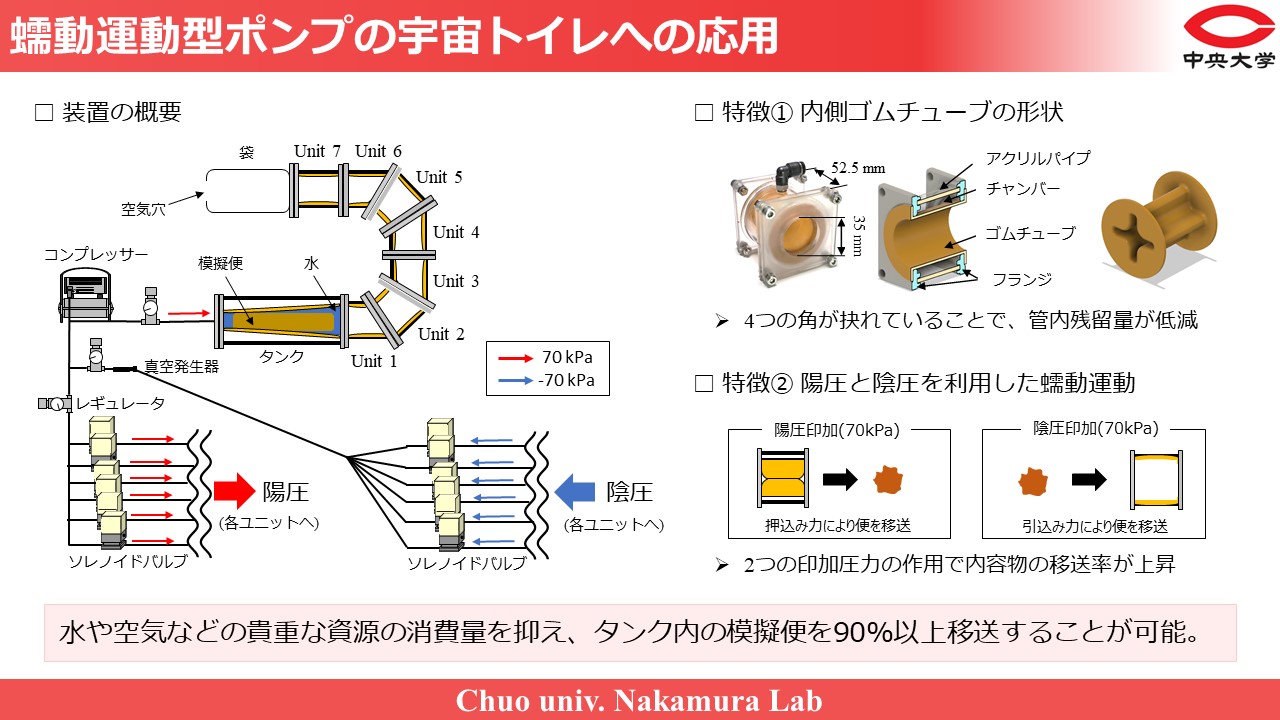
近年、宇宙開発の更なる発展のため、資源補給なしで長期間の有人宇宙探査を行うための再生型環境制御・生命維持システム (ECLSS : Environmental Control and Life Support System)が必要とされています。現在、人間から排出される便は廃棄 されていますが尿と同様に再利用が可能となればECLSSの性能を大きく高めることができます。既存の宇宙トイレでは便の再 利用を視野に入れておらず、便の移送が技術的な課題として存在します。間欠的に存在する粘度の高い固液混合流体を確実に 輸送できる技術は存在せず、これらの技術が確立されれば、宇宙空間における排泄物の移送に限らず、地上での化学プロセス や薬品などの搬送にも役立つと考えています。そこで、宇宙での排泄物搬送を目的とし、生物の腸管を規範とした蠕動運動型 搬送システムの開発を行っています。
実験動画