神経ネットワークによる蠕動運動型ポンプの知能化
関連研究:
固体ロケット蠕動運動ポンプ型ロボット
粉体搬送蠕動運動ポンプ型ロボット
土砂搬送蠕動運動ポンプ型ロボット
宇宙トイレ:有人・微小重力環境下での排泄物搬送
研究目的
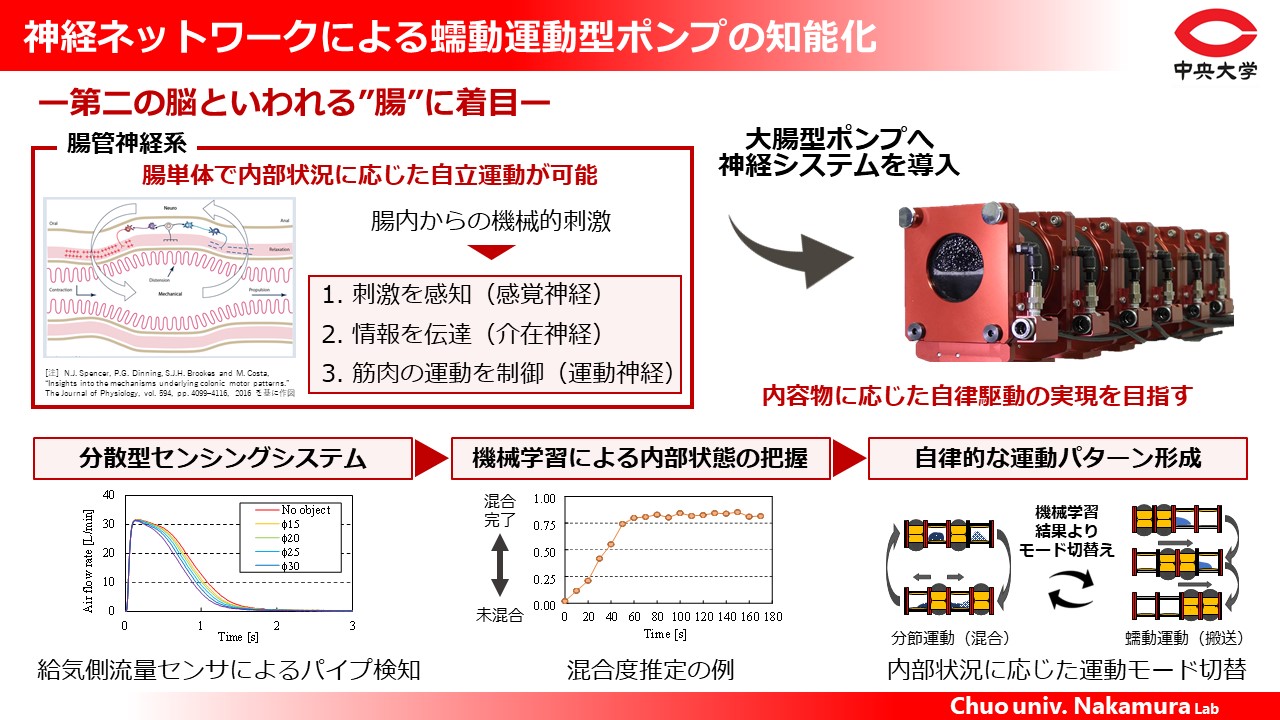
人間は摂取した食物を消化・吸収するために様々な消化器官があります。 消化器官の中でも腸管は別名「第二の脳」と呼ばれ、反射中枢を介さずに反射弓を構成する神経系(腸管神経系)を有しています。 そのため、腸の筋運動は内部からの機械的刺激によって脳からの指令とは独立して制御されています。 これまで本研究室では、腸管を模倣した空気圧駆動の蠕動運動型混合搬送装置の開発を行ってきました。 しかし、予めプログラムされた動きを行うシーケンス制御に留まっていました。 そこで、本装置に腸管神経システムを導入することで、効率的な装置駆動を実現することができ、さらに複雑な腸管神経系の仕組み解明にも繋がると考えています。 本研究では、腸管のようなセンシングシステムの構築、機械学習による内部状態推定、自律的な運動パターンの生成を行うことを目指しています。