蠕動運動型ポンプ(土砂搬送)
関連研究:
固体ロケット蠕動運動ポンプ型ロボット
粉体搬送蠕動運動ポンプ型ロボット
宇宙トイレ:有人・微小重力環境下での排泄物搬送
神経ネットワークによる蠕動運動型ポンプの知能化
研究目的
近年,都市部の効率的な空間利用のために、建築物の高層化と地下空間の利用が進んでいる。高層化により、建物重量を支持する基礎構造が深く、大型化すること、地下に空間を作るために、施工時に地下から地上に搬送する土砂の量が増大している。
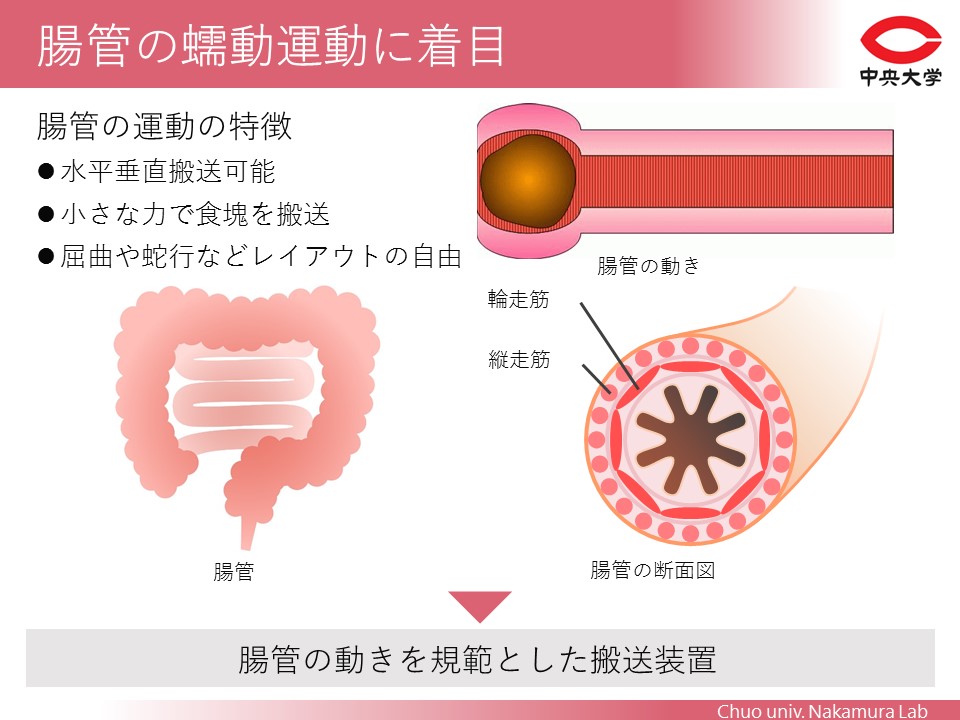
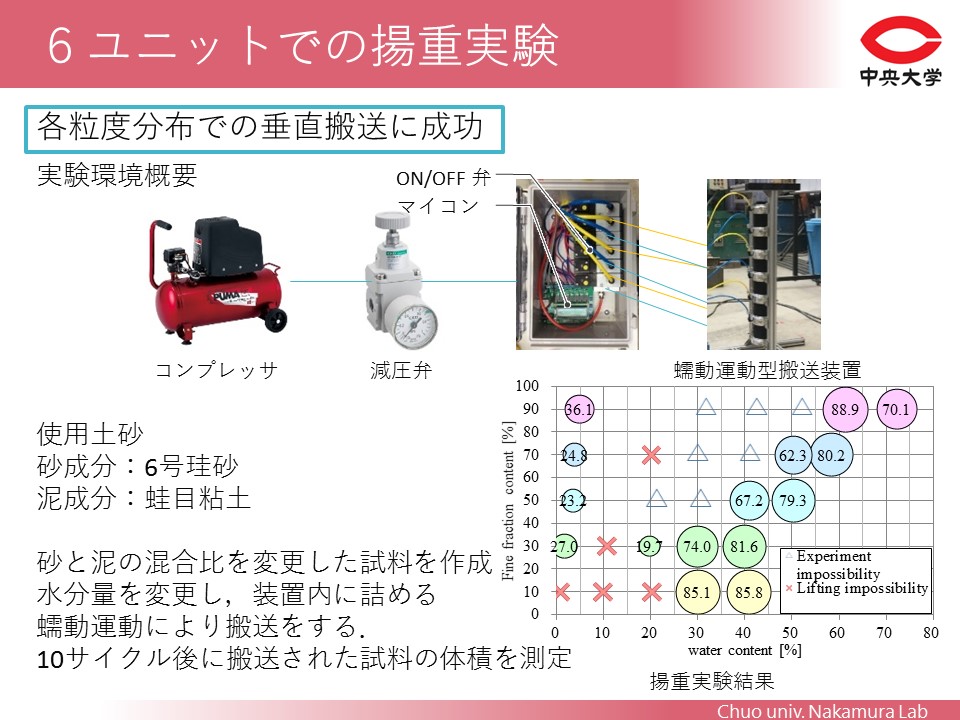
中村研究室で開発された蠕動運動型搬送装置は、各々の節が駆動して波を伝播し、内容物を節ごとに搬送するため、運搬する高さに依存せず連続的な土砂の搬送が期待できる。さらに、分岐・合流・曲がりに対応することで、様々な現場環境への対応が可能である。
特に地下が深い建物において掘削工事が施工計画・建設コスト・工期に与える影響は大きく、建設業の働き方改革に伴い生産性の向上が強く求められている現在、本工事の効率化は経済的・社会的に非常に大きな意義がある。
実験動画