
研究室紹介
■研究室名
生産情報システム研究室(平岡研究室)
■指導教授
平岡 弘之 教授
■研究室所在位置
理工学部 2号館 6階 2601・2609・2617
■主な研究内容
部品エージェントシステム
少自由度のマスターで、多自由度のスレイブを動かすハプティックデバイス
部品エージェントシステム
■研究背景
近年の社会は大量生産・大量消費型の社会構造であるため、資源の枯渇が懸念されています。
循環型社会実現のためには、リユース等の促進が必要になってきています。
■研究目的
部品や機械のリユース促進のために、ネットワークエージェントを利用し、製品のライフサイクルにおける部品の情報を管理する「部品エージェントシステム」を開発することを目的として活動しています。
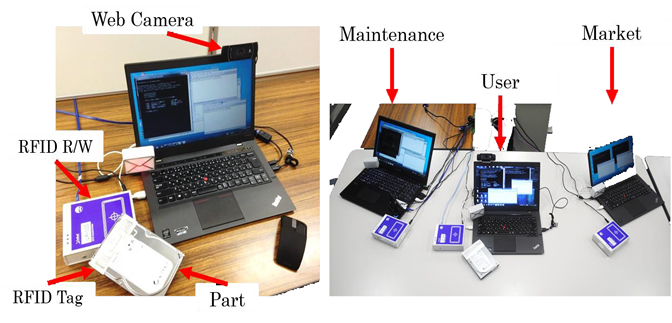
■部品エージェントとは
ネットワークエージェントを利用した、製品のライフサイクルにおける部品の情報管理をするシステムです。
下の写真は、開発中の部品エージェントシステムで、循環型社会の実現をめざして部品の再利用を促進するために部品に取付けた電子タグとネットワーク上を移動するエージェントソフトウェアを用いて個々の部品を管理している様子です。
ハプティックデバイス
■研究背景
多自由度が一般的なHaptic Deviceですが構造が複雑かつ生産コストが高いことがあげられます。
■研究目的
少自由度のHaptic Deviceの有用性を示すため1自由度遠隔組立システムの構築を行っています。
■少自由度のハプティックデバイスとは
ハプティックデバイスとは、操作者が遠隔地や仮想空間の物体に触れたときの力覚や触覚を提示する装置です。
力覚や触覚を感じることで、高現実感覚を得る事ができる一方で、既存のデバイスは、ユーザが扱う手元側(マスター側)の装置が複雑になりがちです。当研究室では、マスター側の自由度を1自由度に限定することで、ユーザが手軽に扱うことができるハプティックデバイスの構築を目指しています。
下の写真は組立作業のための力フィードバックシステムの写真です。運動自由度の少ないハプティックデバイス(右側)で、多自由度のロボット(左側)を遠隔操作して、組立作業を実行します。

年間行事予定
| 3月中旬 | プログラミング講習会 |
| 8月上旬 | OB会 (OB会のお知らせはこちら) |
| 8月中旬 | 前期中間報告会 |
| 8月 | 夏休み |
| 9月上旬 | 平岡研夏合宿 |
| 11月上旬 | 研究室公開(理工学部白門祭) |
| 11月中旬 | 3研究室合同発表会 |
| 12月下旬 | 忘年会 |
| 2月下旬 | 修士論文発表会・卒業論文発表会 |
| 3月中旬 | 謝恩会 |
研究室メンバー
■部品エージェント班
M2
堀 新
B4
家田 玲次
今井 健太
後藤 空
正津 隼光
中山 颯太
■ハプティック班
B4
桐生 智広
岸野 浩太郎