崅弌椡宆嬻婥埑恖岺嬝擏偺奐敪
侾丏 偼偠傔偵
俀丏 嬻婥埑恖岺嬝擏偲偼丠
俁丏 嬻婥埑僑儉恖岺嬝擏偺摿挜偲庬椶偲偼丠
係丏 幉曽朄慇堐嫮壔宆恖岺嬝擏偺挿庻柦壔偵偮偄偰
侾丏偼偠傔偵丂乣廮傛偔崉傪惂偡乣
尰嵼丆僷儚乕傾僔僗僩傗堛椕丒儕僴價儕僥乕僔儑儞僔僗僥儉側偳恖偲儘儃僢僩偑嫤挷妶摦偡傞傛偆側僔僗僥儉偑峀偔媮傔傜傟偰偄傑偡丏偙偺傛偆側僔僗僥儉偵梡偄傜傟傞傾僋僠儏僄乕僞偵偼丆寉検丒崅弌椡偱廮擃惈偑崅偄偲偄偭偨摿挜偑媮傔傜傟偰偄傑偡丏 丂杮尋媶幒偱偼丆揤慠僑儉偲扽慺慇堐傗傾儔儈僪慇堐偺傛偆側曗嫮慇堐傪梡偄傞偙偲偱悽奅嵟崅儗儀儖偺弌椡傪帩偮嬻婥埑僑儉恖岺嬝擏偱偁傞幉曽岦慇堐嫮壔宆嬻婥埑僑儉恖岺嬝擏傪奐敪偟傑偟偨丏丂丂
丂幉曽岦慇堐嫮壔宆恖岺嬝擏嬱摦摦夋
俀丏嬻婥埑僑儉恖岺嬝擏偲偼丠
嬻婥埑僑儉恖岺嬝擏(埲壓丗恖岺嬝擏)偲偼丆僑儉偺傛偆側抏惈攠懱嵽偵嬻婥摍偺棳懱傪拲擖偟偰摦椡傪摼傞傾僋僠儏僄乕僞偺傂偲偮偱偡丏捠忢丆晽慏偺傛偆側朿挘懱偼撪晹偵嬻婥埑傪報壛偡傞偲丆僷僗僇儖偺尨棟傛傝巐曽敧曽偵朿挘偟傑偡(恾1)丏偟偐偟丆偙偺朿挘懱偵慇堐傪暋崌偝偣傞偙偲偱丆偁傞摿掕偺曽岦偵朿挘偑曃傝丆偦偺慇堐偺宍忬曄壔偵敽偆怢挿媦傃廂弅椡偑敪惗偟傑偡丏偲傝傢偗丆嬻婥偺報壛偵傛偭偰乽廂弅椡乿偑摼傜傟傞傾僋僠儏僄乕僞傪嬻婥埑僑儉恖岺嬝擏偲屇傫偱偄傑偡丏丂
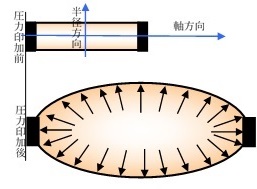
丂恾1 晛捠偺晽慏偺朿傜傒曽
俁丏 嬻婥埑僑儉恖岺嬝擏偺摿挜偲庬椶
1) 嬻婥埑恖岺嬝擏偺摿挜
嘆嬻婥埑僑儉恖岺嬝擏偺摿挜 丂嬻婥埑僑儉恖岺嬝擏偼丆堦斒偺儌乕僞傗桘嬻埑傾僋僠儏僄乕僞偵斾傋偰埲壓偺摿挜傪帩偪傑偡丏 丒寉検偱弌椡枾搙偑崅偄(廳検偵懳偟偰敪惗椡偑戝偒偄) 丒惗懱嬝偲摨條偵壜曄崉惈摿惈傪帩偮(偐偨偝傪曄壔偱偒傞) 丒悈拞傗暡拞偱巊梡壜擻偱偁傞側偳丆懴娐嫬惈偵桪傟偰偄傞 丒悹摦晹偑側偔僗僥傿僢僋僗儕僢僾偑惗偠側偄 丒嵽椏旓偑埨壙偱偁傞(徚栒昳偲偟偰巊梡壜擻) 埲忋偐傜丆恖岺嬝擏偼岺応撪偱偺捈摦傾僋僠儏僄乕僞偲偟偰偺棙梡偩偗偱側偔丆儕僴價儕僥乕僔儑儞婡婍傗僂僃傾儔僽儖僷儚乕傾僔僗僩婡婍摍丆恖娫偵捈愙愙怗偡傞婡夛偺懡偄婡夿僔僗僥儉偵揔偟偨傾僋僠儏僄乕僞偲偟偰拲栚偝傟偰偄傑偡丏嘇嬻婥埑僑儉恖岺嬝擏偺庬椶偲摿挜 丒McKibben宆恖岺嬝擏 尰嵼丆妛弍奅偱峀偔棙梡偝傟偰偄傞恖岺嬝擏偲偟偰丆McKibben宆恖岺嬝擏偑嫇偘傜傟傑偡丏杮恖岺嬝擏偼丆Joseph McKibben偵傛偭偰奐敪偝傟丄摉弶儕僴價儕僥乕僔儑儞梡傾僋僠儏僄乕僞偲偟偰棙梡偝傟傑偟偨丅偦偺屻丆僽儕僡僗僩儞幮偵傛偭偰乽儔僶僠儏僄乕僞乿偲偟偰彜昳壔偝傟丆擔杮拞偵峀偔抦傜傟傞偙偲偲側傝傑偟偨丏恖岺嬝擏偲偄偊偽丆McKibben宆傪巚偄婲偙偝偣傞傎偳堦斒揑偵側偭偰偄傑偡丏偙偺恖岺嬝擏偼丆僑儉僠儏乕僽偵栐栚忬偺僗儕乕僽傪暍偭偨峔憿(恾2)偲側偭偰偍傝丆僠儏乕僽偑朿挘偟偨偲偒偵僗儕乕僽偺栐栚偺妏搙偑傾僐乕僨傿僆儞偺傛偆偵曄壔偡傞偙偲偵傛偭偰丆幉(挿庤)曽岦偵廂弅偡傞椡偑摼傜傟傑偡丏
丂
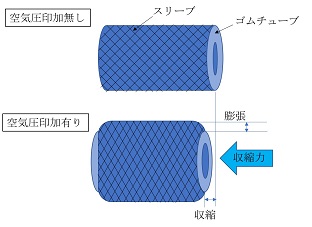
丂恾2 McKibben宆恖岺嬝擏偺峔憿
丒 幉曽岦慇堐嫮壔宆乮崅弌椡宆恖岺嬝擏乯
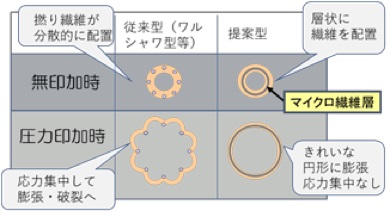
丂杮尋媶幒偱偼崅弌椡偱崅庻柦側恖岺嬝擏偺奐敪傪栚巜偟丆幉曽岦慇堐嫮壔宆嬻婥埑僑儉恖岺嬝擏傪奐敪偟偰偄傑偡(恾3)丏杮恖岺嬝擏偼僑儉僠儏乕僽偵幉曽岦偵傂偒偦傠偊偨曗嫮慇堐傪撪曪偝偣偨峔憿偵側偭偰偄傑偡丏偙偺僑儉僠儏乕僽偵嬻婥埑傪報壛偡傞偲丆敿宎曽岦偵偼朿挘偟傑偡偑丆幉曽岦偵偼曗嫮慇堐偺峉懇偵傛傝朿挘偡傞偙偲偑偱偒傑偣傫丏偦偺寢壥敿宎曽岦偵朿挘偟偨暘偩偗丆幉曽岦偵偼廂弅偟傑偡丏偦偺嵺偺廂弅椡傪傾僋僠儏僄乕僞偺弌椡偲偟偰棙梡偡傞偙偲偑偱偒傑偡丏廬棃傕摨條偵幉曽岦偵慇堐傪憓擖偟偨傾僋僠儏僄乕僞偼懚嵼偟傑偟偨偑(儚儖僔儍儚宆摍)丆擰傝慇堐傪暘嶶揑偵憓擖偟偨偵夁偓傑偣傫偱偟偨丏偙偺曽朄偱偼丆崅埑報壛帪側偳偵墳椡廤拞偑婲偒攋夡偟傗偡偔側傞偲偲傕偵戝偒側廂弅椡傪摼傞偙偲偑擄偟偔側傝傑偡丏杮尋媶幒偱偼丆乽儅僀僋儘慇堐乿傪乽憌忬乿偵攝抲偡傞偙偲偱儚儖僔儍儚宆偺墳椡廤拞偺栤戣傪夝寛偟偨幉曽岦慇堐嫮壔宆恖岺嬝擏傪奐敪偟偰偄傑偡丏恾4偵廬棃宆偲採埬宆偺恖岺嬝擏偺抐柺恾傪帵偟傑偡丏儅僀僋儘慇堐傪憌忬偵攝抲偡傞偙偲偱丆墳椡廤拞偑敪惗偣偢僠儏乕僽慡柺偵傢偨偭偰嬒摍偵埑椡偑暘嶶偝傟傑偡丏偦傟偵傛傝恖岺嬝擏偼旤偟偄 墌宍宍忬傪庢傝側偑傜敿宎曽岦偵嬒摍偵朿挘偟傑偡丏偙傟傑偱儚儖僔儍儚宆恖岺嬝擏偺儃僩儖僱僢僋偲側偭偰偄偨敿宎曽岦偺戝偒側朿挘傗幉曽岦偐傜偺奜椡偵懳偟偰僑儉傗慇堐偺晧扴偑挊偟偔寉尭偝傟傑偟偨丏偙偺岠壥偼丆傾僋僠儏僄乕僞偲偟偰偺埨掕偟偨摦嶌傗崅弌椡壔丆挿庻柦壔偵婑梌偡傞偺傒偱側偔丆屻弎偺朿挘曄宍婡擻傪愊嬌揑偵棙梡偟偨寰摦塣摦婡峔傊偺墳梡偺壜擻惈傪峀偘傑偟偨丏丂
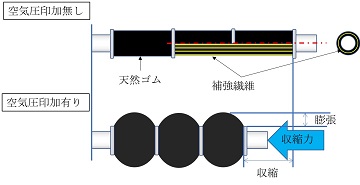
丂恾3丂幉曽岦慇堐嫮壔宆恖岺嬝擏偺峔憿
丂
丂恾4丂儚儖僔儍儚宆偲採埬宆偺恖岺嬝擏偺抐柺恾
偙偺恖岺嬝擏偼丆帺慠挿偵偍偗傞宍忬(挿偝偲捈宎偺斾)偑摨偠応崌丆戝敿偺宍忬偵偍偄偰摨埑報壛帪偺McKibben宆恖岺嬝擏傛傝傕崅偄廂弅椡偍傛傃廂弅検偑摼傜傟傞偙偲偑丆棟榑丆幚尡偺憃曽偺娤揰偐傜専徹偝傟偰偄傑偡丏堦椺偲偟偰丆恾5偵偦傟偧傟偺僑儉恖岺嬝擏偺宍忬乮懢偝丗10mm丆岤偝2mm丆挿偝180倣倣乯傪堦抳偝偣偨応崌偺埑椡亅廂弅棪摿惈偍傛傃帺慠挿帪偺埑椡亅廂弅椡摿惈偮偄偰偺幚尡揑側斾妑傪帵偟傑偡丏側偍丆朿挘帪偼朿挘宎偑偍偍傛偦摨摍偲側傞傛偆幉曽岦慇堐嫮壔宆恖岺嬝偵偼儕儞僌偑憓擖偝傟偰偄傑偡丏偙偺恾傛傝幉曽岦慇堐嫮壔宆恖岺嬝擏偑廂弅棪偍傛傃廂弅椡偵偍偄偰桪傟偰偄傞偙偲偑帵偝傟偰偄傑偡丏丂
丂
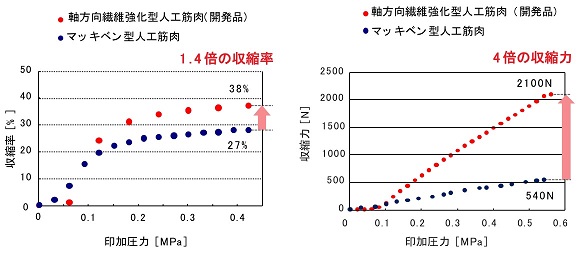
丂恾5丂McKibben宆偲幉曽岦慇堐嫮壔宆恖岺嬝擏偺廂弅摿惈斾妑
傑偨丆杮恖岺嬝擏偼栚昗偺巇條(廂弅椡丒廂弅検摍)偵婎偯偒宍忬傗嵽幙(懢偝丆挿偝丆岤偝丆僑儉嵽椏)傪帺桼偵愝寁偡傞偙偲偑偱偒傞偲偲傕偵丄偦偺惓妋側埵抲傗椡丒崉惈傕梕堈偵惂屼偡傞偙偲偑壜擻偱偡丅偝傜偵丄杮恖岺嬝擏偺乽敿宎曽岦傊偺朿挘媦傃幉曽岦傊偺廂弅乿傪惗偐偡偙偲偵傛傝廬棃偺傾僋僠儏僄乕僞偱偼幚尰崲擄偱偁偭偨塣摦傪堷偒弌偡偙偲偑壜擻偲側傝丆僜僼僩儘儃僥傿僋僗偺壜擻惈傪峀偘傞偙偲偑偱偒傑偡丏嬶懱揑偵偼丆儈儈僘傗戝挵偺寰摦塣摦傪柾曧偟偨儘儃僢僩偺尋媶奐敪側偳傪峴偭偰偄傑偡丏
丂儈儈僘儘儃僢僩仺徻偟偔偼偙偪傜
丂寰摦塣摦億儞僾仺徻偟偔偼偙偪傜
丂
係丏幉曽岦慇堐嫮壔宆恖岺嬝擏偺挿庻柦壔偵偮偄偰
廂弅摿惈偵桪傟偨幉曽岦慇堐嫮壔宆恖岺嬝擏偱偡偑丆尨棟揑偵僑儉偺戝曄宍傪棙梡偟偰偄傞偨傔旀楯庻柦偑抁偄偲偄偆寚揰偑偁傝傑偟偨丏偦偺偨傔丆摉尋媶幒偱偼恖岺嬝擏偺挿庻柦壔偵庢傝慻傫偱偄傑偡丏L/D斾偺曄峏媦傃怢挘寢徎壔摿惈傪棙梡偡傞偙偲偱丆捠忢偼悢愮夞掱搙偱偁偭偨旀楯庻柦偑悢廫枩偐傜100枩夞掱搙偲側傝栺100攞偺挿庻柦壔偵惉岟偟偰偄傑偡丏 杮撪梕偼崙棫尋媶奐敪朄恖怴僄僱儖僊乕丒嶻嬈媄弍憤崌奐敪婡峔(NEDO)傛傝僾儗僗儕儕乕僗偝傟偰偄傑偡丏https://www.nedo.go.jp/news/press/AA5_101253.html
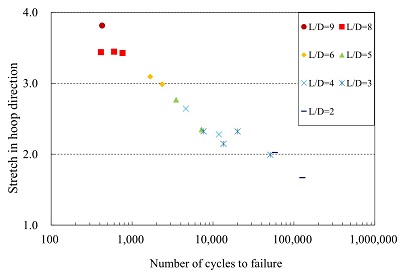
嘆L/D斾偺曄峏偵傛傞庻柦傊偺塭嬁昡壙 恖岺嬝擏偺撪宎D偲壱摥晹挿偝L偺斾(L/D斾)傪曄峏偡傞偙偲偱丆曄宍宍忬偑曄壔偟僑儉偵偐偐傞傂偢傒傕曄壔偟傑偡丏偦偺偨傔丆L/D斾傪曄峏偟偨嵺偺旀楯庻柦偺昡壙傪偟傑偟偨丏帋尡寢壥傪恾6偵帵偟傑偡丏恾偐傜L/D斾傪彫偝偔偡傞偲旀楯庻柦傪岦忋偱偒傞偙偲偑傢偐傝傑偡丏 徻嵶偼埲壓榑暥傪偛棗偔偩偝偄丏
乬幉曽岦慇堐嫮壔宆嬻婥埑僑儉恖岺嬝擏偺挿庻柦壔偺偨傔偺嵽椏偲傾僗儁僋僩斾偺専摙乭丆擔杮婡夿妛夛榑暥廤丆Vol.84丆No.857(2018.1)
丂
丂恾6丂L/D斾傪曄峏偟偨嵺偺恖岺嬝擏偺旀楯庻柦帋尡寢壥
嘇揤慠僑儉偺怢挘寢徎壔摿惈傪棙梡偟偨挿庻柦壔 杮尋媶偱偼恾7偵帵偡傛偆偵僑儉偺怢挘寢徎壔摿惈偵拝栚偟丆寢徎憌偵傛傝婽楐偺惉挿傪慾奞偟丆幉曽岦慇堐嫮壔宆恖岺嬝擏偺挿庻柦壔専摙傪偟傑偟偨丏
丂
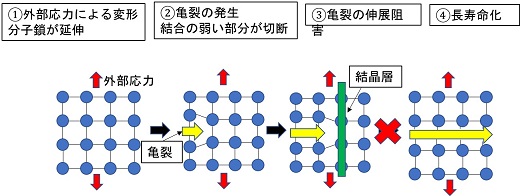
丂恾7丂怢挘寢徎壔偵傛傞婽楐怢揥慾奞儌僨儖
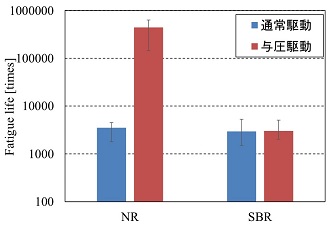
丒梌埑報壛偵傛傞恖岺嬝擏偺庻柦昡壙 丂怢挘寢徎壔偵傛傞幉曽岦慇堐嫮壔宆恖岺嬝擏偺挿庻柦壔岠壥傪妋擣偡傞偨傔偵懴媣惈帋尡傪幚巤偟傑偟偨丏帋尡寢壥傪恾8偵帵偟傑偡丏恾傛傝捠忢嬱摦偱偼揤慠僑儉(寢徎惈桳)媦傃僗僠儗儞僽僞僕僄儞僑儉(寢徎惈柍)偱庻柦偵戝偒側嵎偼尒傜傟傑偣傫偑丆揤慠僑儉偱偼梌埑嬱摦(寢徎壔傪棙梡偟偨嬱摦曽幃)偲偡傞偙偲偱捠忢偺100攞掱搙偺挿庻柦壔傪恾傞偙偲偑偱偒傑偟偨丏 徻嵶偼埲壓偺榑暥傪偛棗偔偩偝偄丏
乬揤慠僑儉偺怢挘寢徎壔傪梡偄偨幉曽岦慇堐嫮壔宆嬻婥埑恖岺嬝擏偺挿庻柦壔乭, 擔杮僼儖乕僪僷儚乕僔僗僥儉妛夛榑暥廤, Vol.50, No.2,乮2019.11乯
丂
丂恾8丂捠忢嬱摦媦傃梌埑嬱摦偵傛傞懴媣惈帋尡寢壥