研究の概要
1.バイオメカトロニクスとは?
中村研究室は「バイオメカトロニクス研究室」と名づけられております。
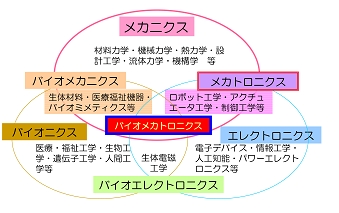
「バイオメカトロニクス」とは『Bio (生物/生体) + Mechanics (機械) + Electronics (電子)』の3つを組み合わせた学際的な新しい学問領域です。
とりわけ本研究室では、人間を含めた生物の運動やその機能を模倣・応用することで,福祉・医療・レスキューをはじめとしたロボットや人間と共存可能なメカトロニクス機器の開発を行っています。
2.ソフトロボティクスと生物型ロボット
私たちの研究室は、「生物型ロボット」と「ソフトロボティクス」をキーワードとして研究しています。
生物の基本的な駆動手段は筋肉による直動・収縮運動です。脊椎動物や節足動物のような筋骨格筋を有する生物は、筋肉の直進駆動を拮抗関節駆動により回転運動に変換してます。一方、ミミズやカタツムリ等の軟体動物は基本的に平滑筋による駆動であり骨格がありません。したがって比較的自由に筋肉を配置することができ、ユニークな筋肉配置や駆動方法が見受けられます。
現在のほとんどのメカトロニクス機器はモータを中心とした回転系駆動を前提として、すべての機構が構成されています。しかしながら、しばしば回転機構が大型化や非効率化を招く例もあり、状況や機能に応じて軟体動物のような平滑筋による柔軟構造をもった機能が求められることもあります。また、これらの駆動手段により今までにない新しい機能や機構を生み出す可能性もあります。
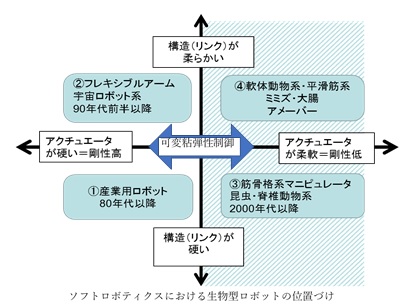
上図にソフトロボティクスに関するチャートを示します。本チャートはリンク系を縦軸に、アクチュエータ・センサ系の柔軟さを横軸にとることで以下のように分類できるものと考えます。
① アクチュエータとリンクが硬い:産業用ロボット等の従来の高精度位置制御系のロボット等
② アクチュエータが硬くリンクが柔らかい:フレキシブルアームや宇宙ロボティクス等
③ アクチュエータが柔らかくリンクが硬い:人工筋肉アームなどの可変剛性系ロボット
④ アクチュエータとリンクが柔らかい:ミミズやカタツムリ等の軟体生物ロボット
とりわけ図中斜線の領域(③と④)は生体や生物型ロボットに多く見られ、人工筋肉等のソフトアクチュエーションの特徴を生かしたロボット設計が可能となります。
本研究室では、この③と④を中心としてソフトアクチュエーションにおける生物型ロボットについて研究しています。
構造的な柔軟さというのは、周辺環境に対して大げさなセンサや制御を必要とせず、シンプルなシステムを構成することができます。また可変剛性制御や可変粘弾性制御等を取り入れることによって、「作業をするときには固く」「普段は柔らかく」といった人間の筋骨格のようなロボットシステムを構築することも可能になります。