アメンボロボット
― イメージは船とロボットの融合 水陸両用型ロボット ―
アメンボの概要
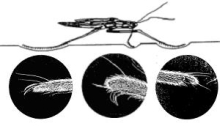
アメンボは6本の脚で水面を広く押さえて浮いています。 水上移動時は前脚と後脚で体を支え、中脚を前方から後方へ掻くことによって推進力を得ています。
アメンボの移動機構
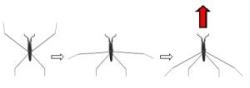
水上移動時、アメンボは水面をすべる様に移動します。 そのとき前脚と後脚で水面を押さえ、体を支えます。 また、中脚は前方から後方へオールの様に動かします。 この中脚の動きによってアメンボは推進力を得て前進します。
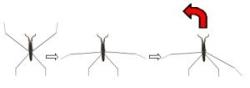
旋回時は、旋回方向と反対側(外側)の中脚を前方から後方へ動かし推進力を得ます。 また、旋回方向側(内側)の中脚は後方へ掻ききらず、体を支え、回転を制御します。 つまり、外側の推進力の方が内側の推進力より大きいため、アメンボは旋回します。
研究概要
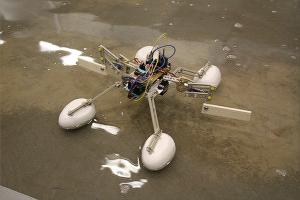
アメンボを規範とした6脚型水陸両用移動ロボットHARo-Ⅰ、HARo-Ⅱを製作しました。
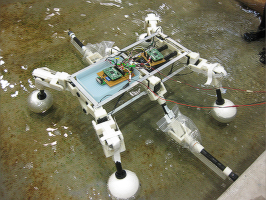
HARo-Ⅰは、アメンボロボットのプロトタイプとして開発しました。前後4脚を歩行用、 中脚をオール用として用い、水陸両用移動機構を開発しました。前後4脚にフロートを取り付け、 浮力で水上を浮揚することが出来ます。実機にカメラ等を搭載し、水上陸上で活用することができます。
HARo-Ⅱは、HARo-Ⅰを改良し、大型化、中脚を脚とオールの併用を可能にしました。 陸上歩行時は6脚すべてを用い、歩行方法として、交互三点接地歩容を用いました。 水上移動時は、中脚をオールに切り替え、前後4脚を支持脚として、水上移動を実現しました。
実地実験(琵琶湖環境調査ロボット)
-
HARo-I
-
HARo-II
Movie
-
実際のアメンボ
-
Haro-Ⅰ
-
HARo-I(水上)
-
(陸上)