柔軟外骨格を有するソフトグリッパ 「PneuFinger」
研究目的
ソフトグリッパは多種品目の把持を実現するエンドエフェクタとして研究を進めています。空気圧で駆動するソフトグリッパは空圧由来のコンプライアンス特性によって把持物体の形状になじんだ把持が可能です。これによって壊れやすい卵や潰れやすい果物をやさしく把持することができます。一方で、一般的なソフトグリッパは高重量物の把持には向いておらず、指の数を増やすなどの工夫が必要でした。本研究ではソフトグリッパに柔軟外骨格を採用してグリッパに異方性を付与することで、従来のソフトグリッパのメリットを生かしながらも、高重量物の把持を実現することに成功しました。この成果は農業や三品業界など多種品目の把持が必要とされる現場への応用が期待されています。
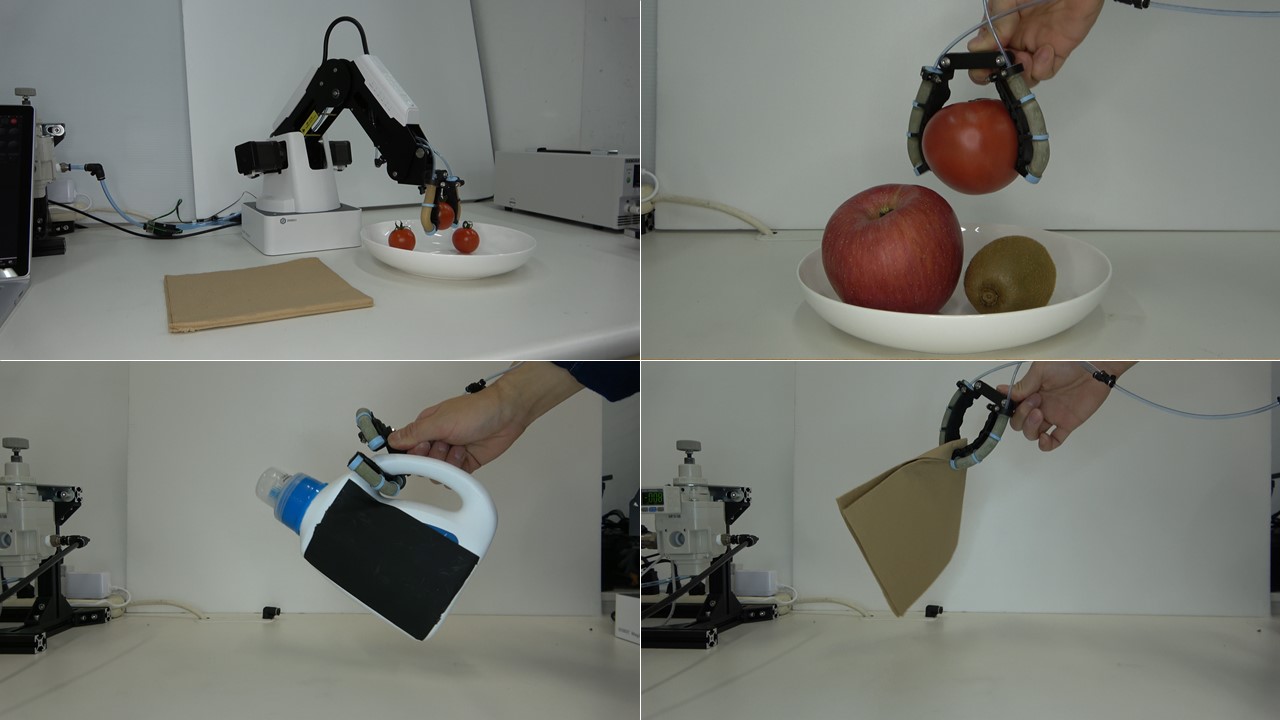
PneuFingerによる把持の様子(左上:ミニトマト、右上:果物、左下:洗剤容器(1kg)、右下:布)