シャコの打撃動作を規範とした高速打撃機構
研究背景
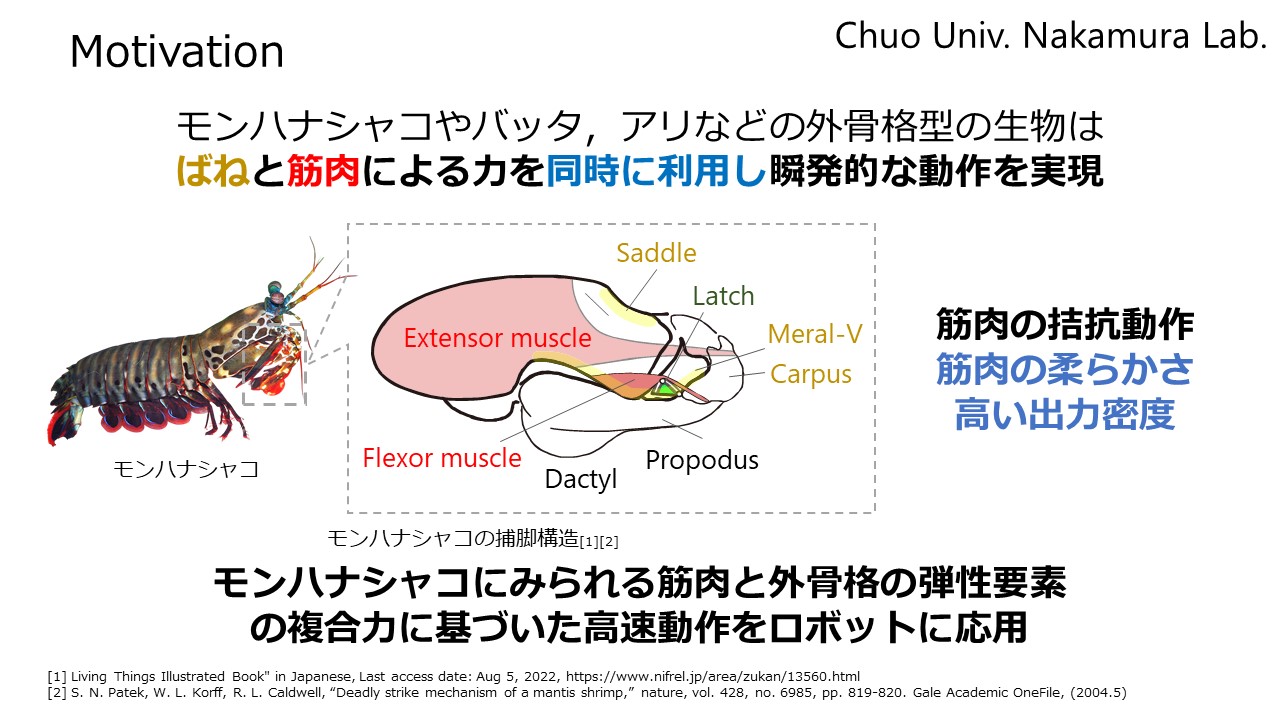
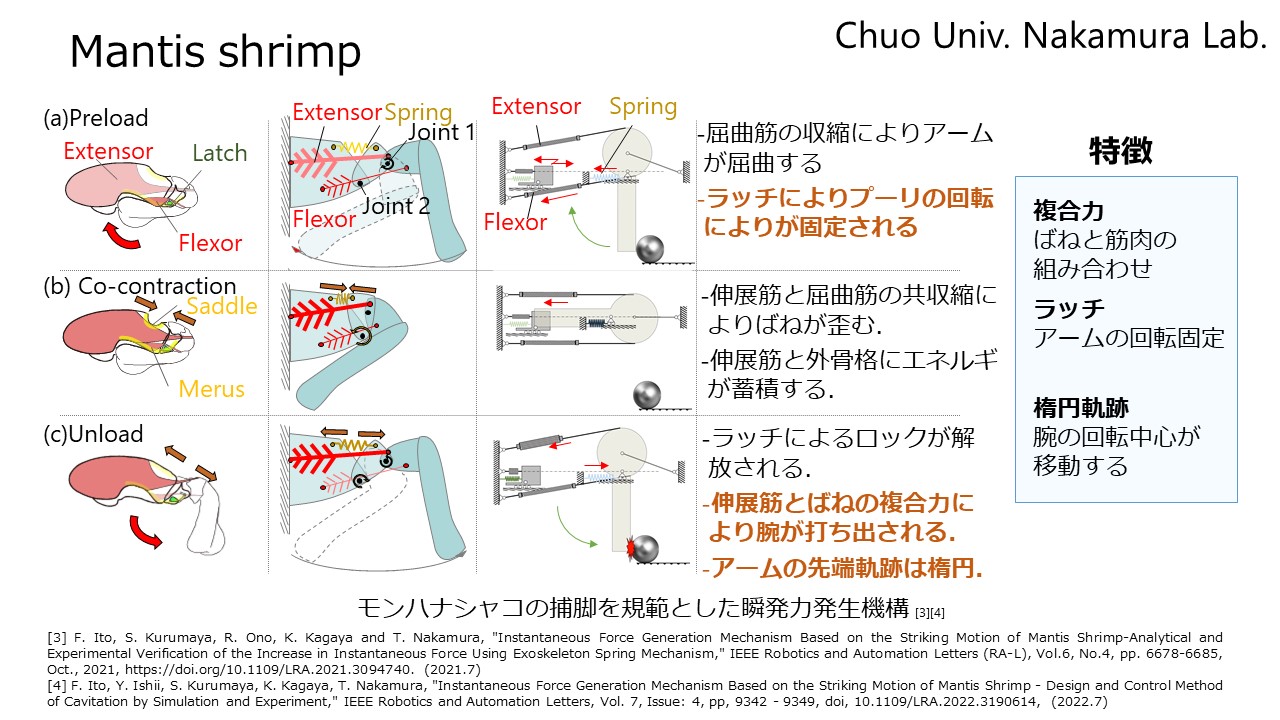
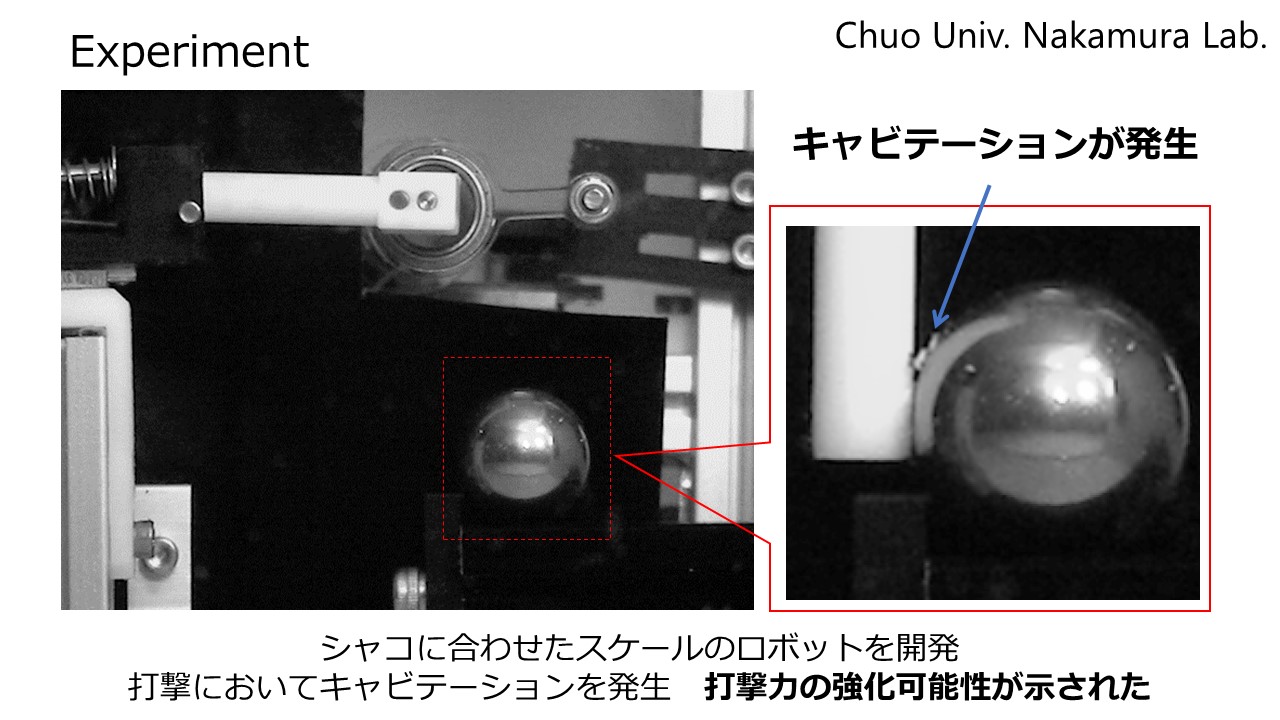
シャコは外骨格を自身の筋肉の収縮力により歪ませることで、水中においても筋肉の収縮速度をはるかに上回る速度の打撃動作を実現し、とくに打撃箇所においてはその打撃に伴うキャビテーションという現象を発生させるなど、多くの特徴を持っています。本研究では、シャコの打撃機構を規範としたロボットを開発することで、 空気圧人工筋肉の拮抗関節の瞬発性を向上させ、生物の瞬発力・打撃力の向上メカニズムを解明するための機構を提案しています。
シャコは外骨格を自身の筋肉の収縮力により歪ませることで、水中においても筋肉の収縮速度をはるかに上回る速度の打撃動作を実現し、とくに打撃箇所においてはその打撃に伴うキャビテーションという現象を発生させるなど、多くの特徴を持っています。本研究では、シャコの打撃機構を規範としたロボットを開発することで、 空気圧人工筋肉の拮抗関節の瞬発性を向上させ、生物の瞬発力・打撃力の向上メカニズムを解明するための機構を提案しています。