握手ロボット
研究目的
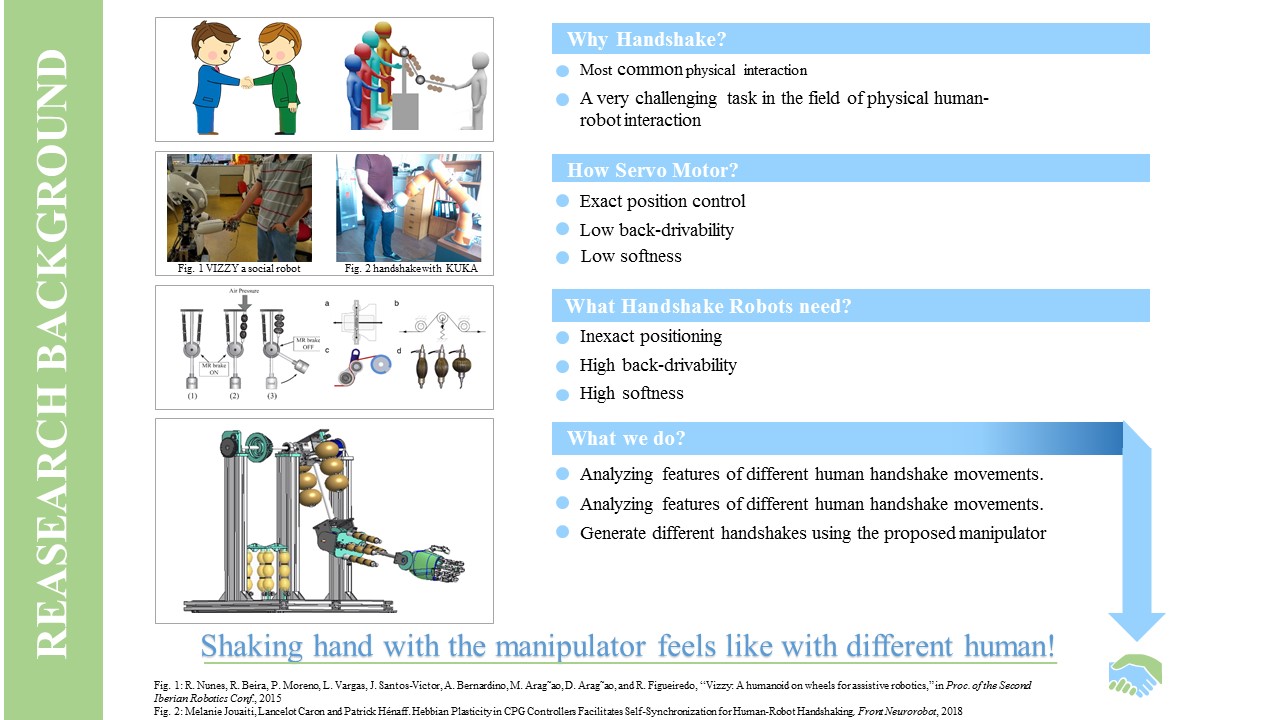
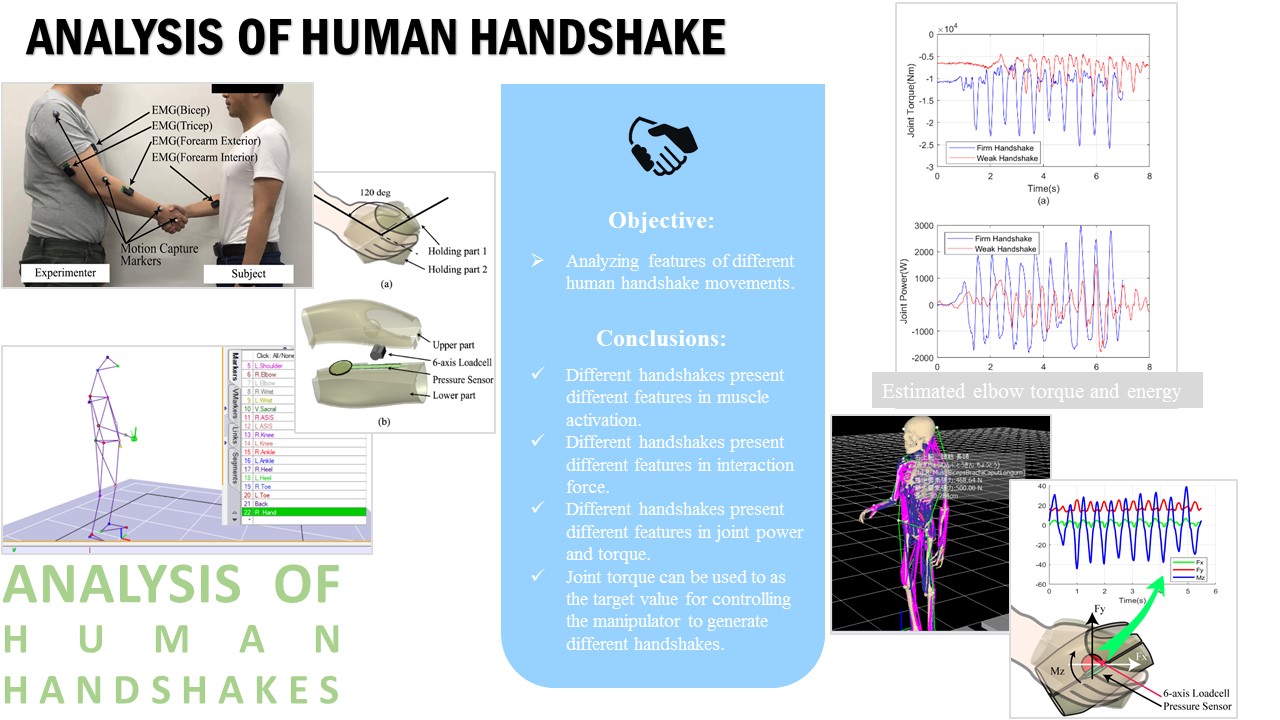
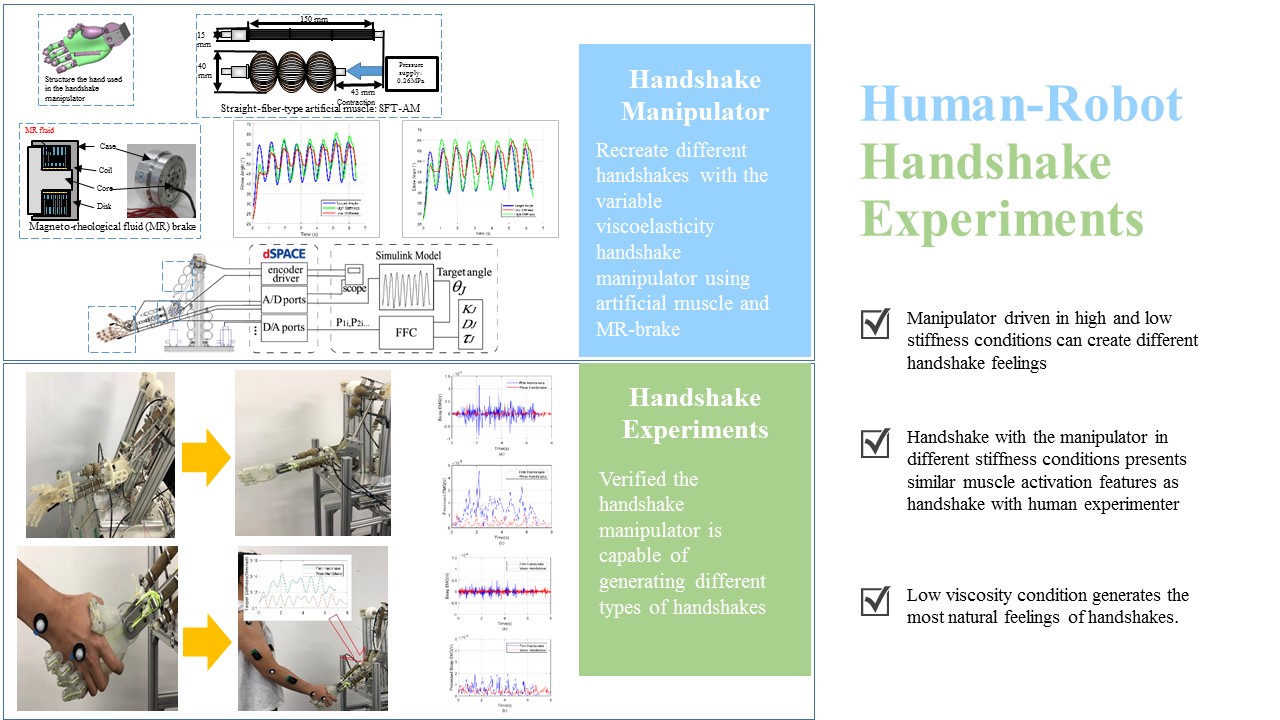
人の生活環境にロボットが普及しつつある。そのようなロボットの中で、人と社会的なインタラクションをするロボットが開発されており、接客や介護の分野への応用が期待されている。これらのロボットは言語や表情、ジェスチャーなどを通して人とコミュニケーションを行うが、身体的なインタラクションを伴うコミュニケーションは行っていない。より発展的なインタラクションには、身体的なインタラクションが不可欠であると考える。しかし、モータと減速機を用いる既存のアクチュエーションは、バックドライバビリティに乏しいなど課題が存在する。加えて、モータによる角度やトルク制御による駆動は、粘弾性を変化させながら駆動する人の関節とは動作方法が異なるため、違和感が避けられないと考える。そこで本研究では、人の関節のように関節角度やトルクだけでなく粘弾性も変化させながら駆動することで、弾性として人工筋肉と粘性としてMRブレーキを用いて自然なインタラクションを行うロボットの開発を目標とする。
実験動画