カタツムリロボット
研究目的
近年、飛行機の運用機体数が増加し、機体点検の効率化が求められている。 しかし、飛行機の点検作業の多くは人の手で行われており、効率化が困難である。 そこで、作業ロボットでの代行が期待される。 構造物を検査するロボットとしてマルチコプターの開発が盛んである。 しかし、マルチコプターは風雨に弱いというデメリットがあり、野外での作業が多い飛行機点検では不向きである。 そこで、本研究では飛行機点検を目的とした壁面移動ロボットの開発を行う。
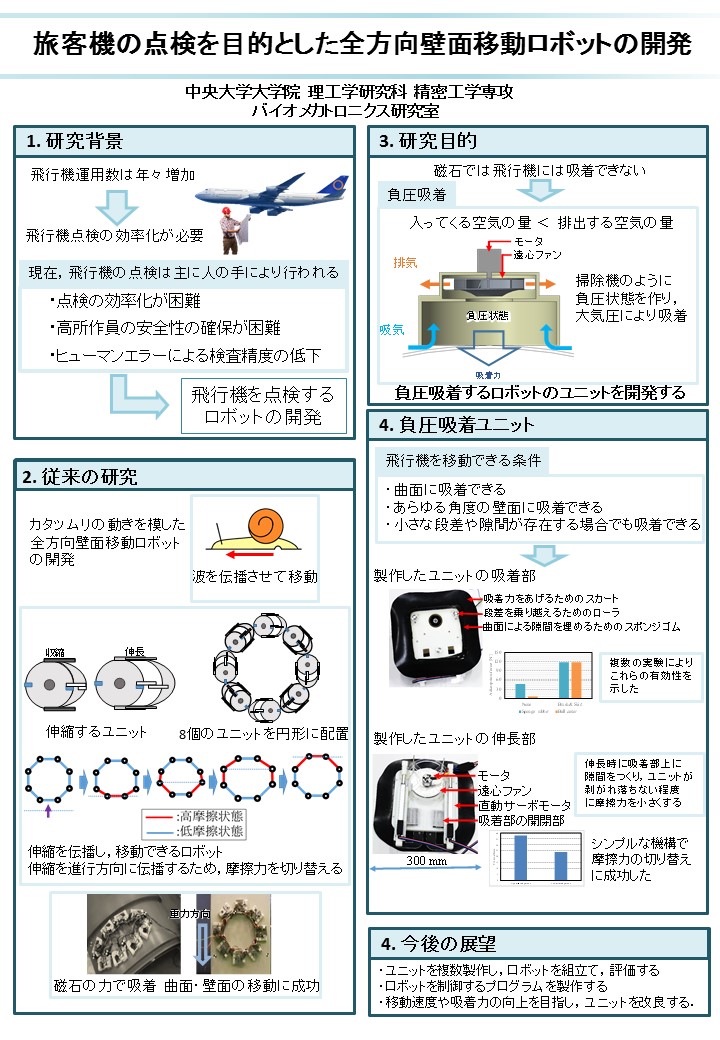
近年、飛行機の運用機体数が増加し、機体点検の効率化が求められている。 しかし、飛行機の点検作業の多くは人の手で行われており、効率化が困難である。 そこで、作業ロボットでの代行が期待される。 構造物を検査するロボットとしてマルチコプターの開発が盛んである。 しかし、マルチコプターは風雨に弱いというデメリットがあり、野外での作業が多い飛行機点検では不向きである。 そこで、本研究では飛行機点検を目的とした壁面移動ロボットの開発を行う。