蠕動運動型ポンプ(粉体搬送)
関連研究:
固体ロケット蠕動運動ポンプ型ロボット
土砂搬送蠕動運動ポンプ型ロボット
宇宙トイレ:有人・微小重力環境下での排泄物搬送
神経ネットワークによる蠕動運動型ポンプの知能化
研究目的
我々の身の回りには食品や医薬品、工業製品として様々な形態の粉体が用いられている。既存の粉体搬送装置はベルトコンベアやスクリューコンベアなどが挙げられる。
著者らは印刷機で扱われている粉体である現像剤の搬送に着目した。一般的な印刷機では現像剤の搬送にスクリューコンベアが用いられている。しかし、スクリューコンベアと壁面間に生じるせん断力やスクリュの高速回転によるモータの温度上昇から粉体に塊が生じる凝集が生じる。そのため、現像剤の搬送には温度管理と搬送時の圧力を考慮しなくてはならなく、低せん断力、低温での高速搬送が求められている。
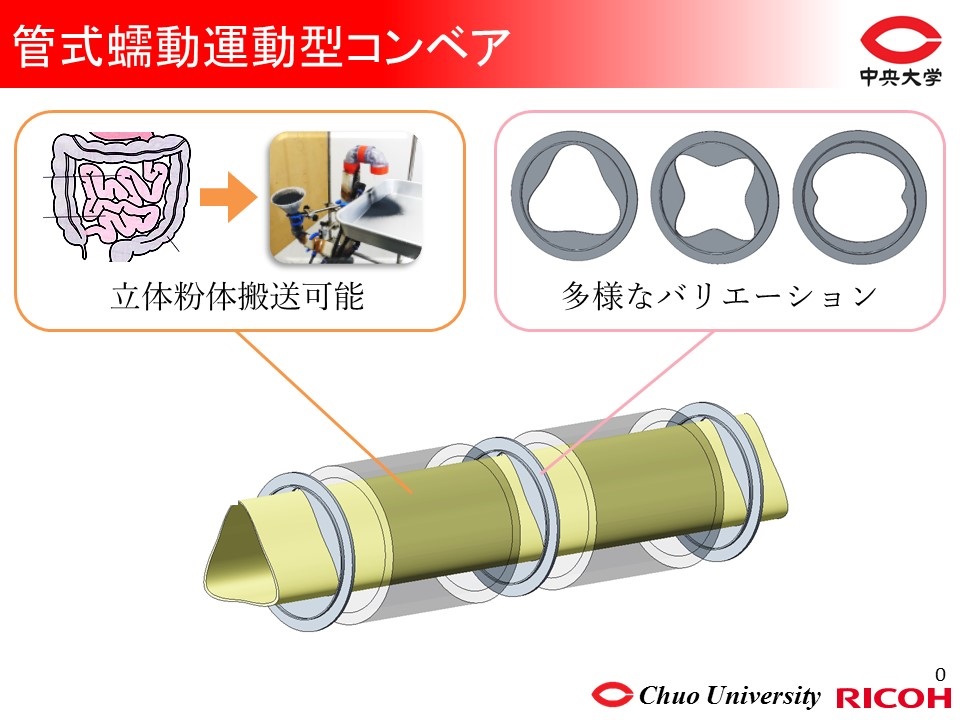
一方、著者らは腸管を模擬した搬送装置を開発してきた。腸管の小さな力で食塊を搬送する仕組みを規範とし、空気圧駆動によるゴム膨張を用いた搬送方法であれば、低せん断力、低温での粉体搬送が可能であると考えた。