MRブレーキ搭載型人工筋肉マニピュレータ
― MRブレーキで人工筋肉マニピュレータの振動抑制! ―
研究背景
人工筋肉は軽量で高出力、かつ柔軟という特徴を有しています。 そこで、本アクチュエータをマニピュレータに適用することで、 人間との接触に対し安全性を確保しようと考えました。
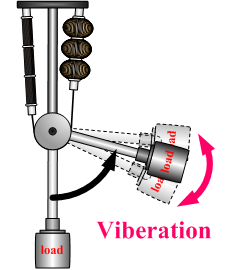
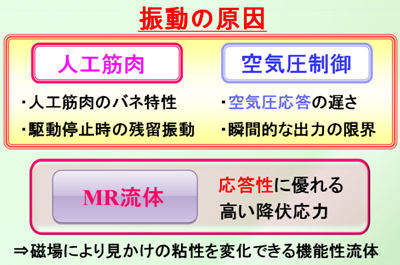
しかしながら、柔軟性(バネ特性)をもつが故に、高負荷に対し挙動が振動的になってしまうという欠点を有しています。 また、従来の人工筋肉マニピュレータは空気圧によって動作するため応答が遅く、 瞬間的な力に限界があります。これらの欠点により、物体保持や持上動作ではアームに制御不能な振動を生じ、 安定しにくいという問題点がありました。
そこで、本研究ではMR流体を関節に適用した1自由度人工筋肉マニピュレータを提案し、 物体持上・保持動作でのMR流体によるアームの振動抑制を検討しました。
Movie
-
持上実験
-
保持実験
MRブレーキの概要
MR流体
本研究ではMR流体(図1)に着目しています。MR流体は磁場を与えることにより、 高い応答速度(ミリ秒単位)で見かけの粘性を可逆的に変化させる機能性流体です。 本流体を人工筋肉マニピュレータの関節部に適用することで、 空気圧では成しえない高周波領域での角度制御を実現します。
MRブレーキ
本研究ではMRブレーキ装置としてLORD社のMRB-2107-3(図2)を使用しています。 本装置はMR流体を内部のディスク部周りに配置し、 磁場の変化に伴いディスク部表面の粘性摩擦を変化させます。 その結果、回転動作に対し連続的にトルクを制御することができます。
-
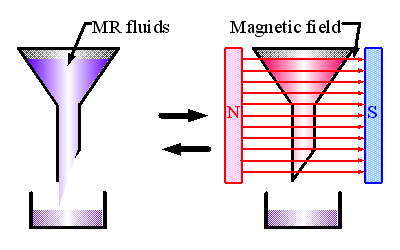
図1 MR流体の概要
-
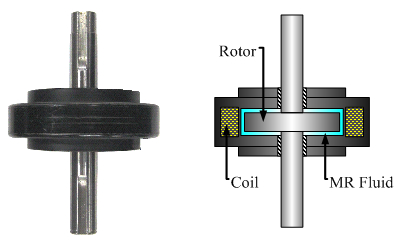
図2 MRブレーキ
MRブレーキ搭載型人工筋肉マニピュレータ
本研究で製作した人工筋肉1自由度マニピュレータの全体図を図3に示します。 人工筋肉マニピュレータは、2つの人工筋肉が拮抗する形で配置されており、 プーリを介して人工筋肉の収縮力を回転軸に伝達する機構となっています。
MRブレーキ装置は第1リンク側に固定されており、 これにより回転軸にブレーキを掛けることが可能です。 また、本マニピュレータは関節角度を検出するためのエンコーダと、 リンク先端にかかる負荷検出のためのひずみゲージを搭載しています。
-
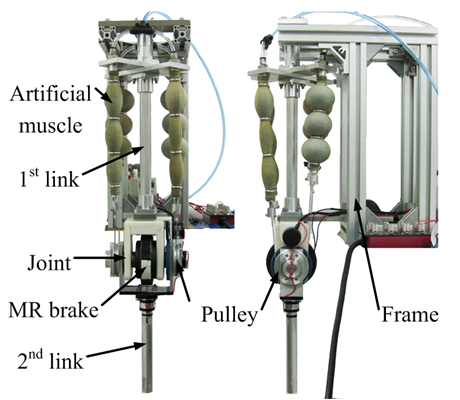
図3 MRブレーキ搭載型人工筋肉マニピュレータ
振動抑制実験
持上実験
物体持上実験の実験結果(図4)より空気圧制御のみの場合、 人工筋肉のばね特性と高い外乱トルクによりアームが振動しています。 しかし、MRブレーキを適用することでアーム停止時の振動抑制を確認しました。
保持実験
物体保持実験の実験結果(図5)よりブレーキをかけない場合、 重りの負荷によりアームが落下し振動しています。 それに対し、MRブレーキを適用した場合、アームの落下と振動の抑制を確認しました。
-
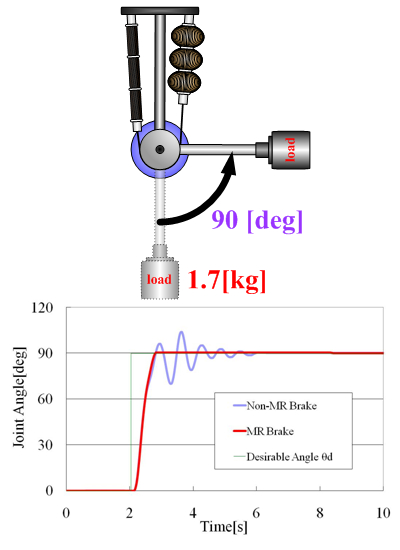
図4 持上実験
-
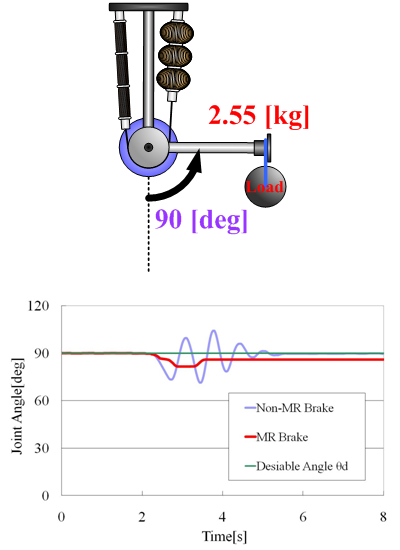
図5 保持実験