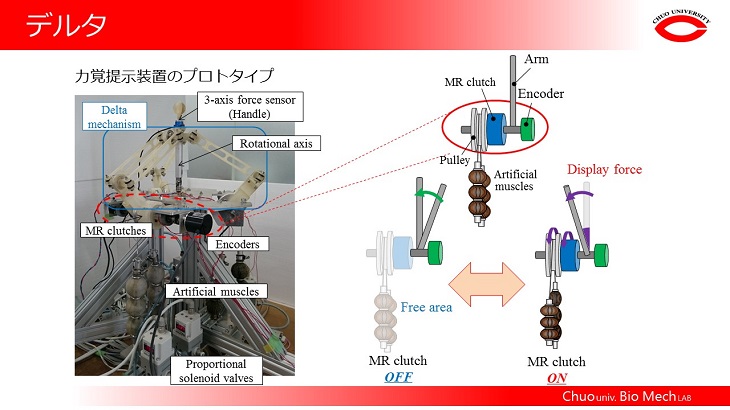
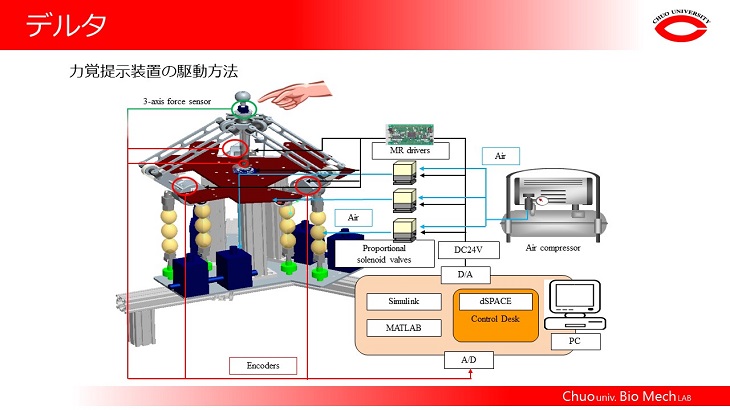
デルタ型ハプティクス
関連研究:
装着型ARハプティクス
MR溶接
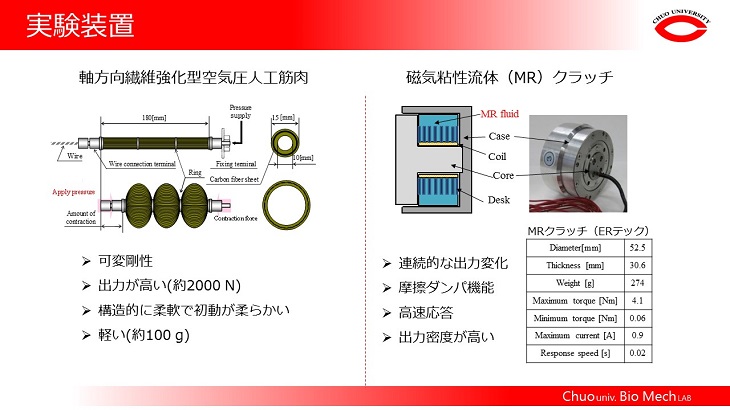
空気圧人工筋肉とMR流体クラッチを用いた力覚提示装置の開発
研究目的
仮想的な物体に触れた感覚などの反力(力覚)を提示する力覚提示装置は手術などの遠隔操作やエンターテイメント等の幅広い分野で活用され、直感性に優れた操作を実現します。しかし、従来装置は、モータで駆動するため硬い物体から柔らかい物体まで幅広く提示できず、予期せぬ外力に対し応答が遅れる安全性の低い装置でした。そこで、構造的に柔軟・安全で、幅広い剛性(硬さ/柔らかさ)変化域を持つ空気圧人工筋肉と、安全装置としてMR流体クラッチを採用した新装置を提案します。