人工筋肉ロボットハンド
ワイヤ型人工筋肉の開発およびロボットハンドへの応用
研究背景
近年,医療・介護ロボット,ヒューマノイド等のロボットが人間の生活環境に進出し,人間とロボットが接触する機会が増えています. そのため,人間との接触時の安全確保や人との協調作業を行うロボットハンドは,軽く,構造が柔軟なことが望ましいと考えられます. ロボットハンドは,その駆動方法により,各関節にアクチュエータを内部に設置するアクチュエータ内蔵型とハンドの外部にアクチュエータを配置し, ワイヤを介して駆動させるワイヤ接続型に分類されます.前者は,モータを内蔵しているため重く,関節の剛性を変化できない. また,後者はアーム部の運動に影響を受けるため構造が複雑になるという欠点があります. そこで,本研究では,軸方向繊維強化型ゴム人工筋肉を細型化したワイヤ型空気圧ゴム人工筋肉を開発しました. これをアクチュエータとしてハンドに内蔵したロボットハンドを開発しました. このロボットハンドには,他のロボットハンドに比べ,軽量,関節が柔軟,機構がシンプル,駆動系に大きなスペースを要しないという利点があります.
ワイヤ型人工筋肉
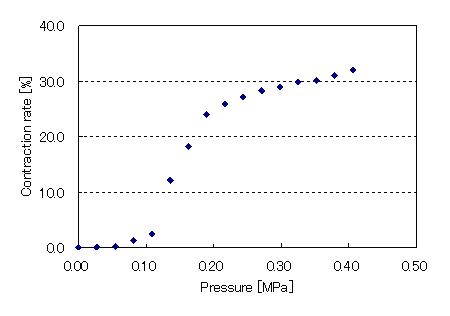
本研究室で研究されている人工筋肉を細型にしたものを開発しました.内径は1〜2.5[mm]と既存の軸方向繊維強化型人工筋肉(内径14[mm])に比べ小さくなっています.細くなっていますが最大収縮率は30[%]前後を実現しています.最大膨張直径は約11[mm](内径2.5[mm]時)となっています.
ロボットハンド
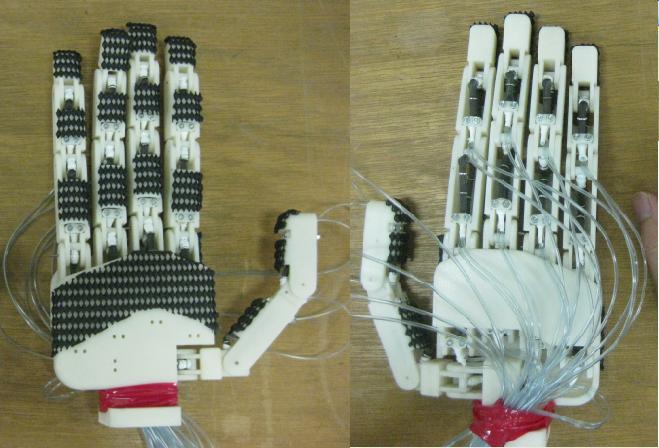
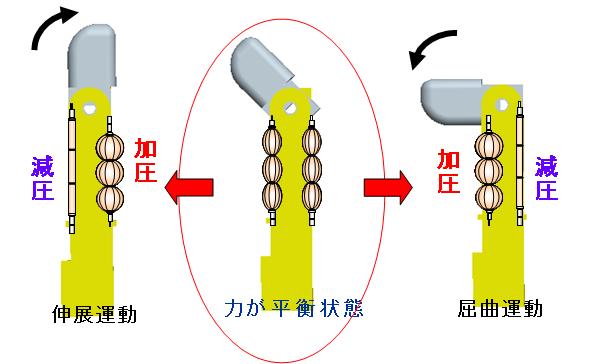
ワイヤ型人工筋肉を屈曲(指の曲げ),伸展(指の伸ばし)に使用します.各関節に屈曲・伸展のために2本ずつ配置しています.関節の内部はスライダクランク機構になっており,人工筋の収縮運動(直動運動)を指の屈曲伸展運動(回転運動)に変換します.人工筋肉を2本配置することにより,関節の剛性を高めることも可能です.
Movie
-
ワイヤ型人工筋肉
(1本) -
ワイヤ型人工筋肉
(3本) -
ロボットハンド握り動作
-
ロボットハンドつまみ動作