象の鼻ロボット
象の鼻を規範とした超冗長マニピュレータ
― 大自由のマニピュレータ!象の鼻のように複雑な動作ができます ―
研究背景
一般的なマニピュレータは、エンドエフェクタのすべての位置・姿勢を指定するには少なくとも6自由度が必要となります。 しかし原子炉内や化学プラント内などでは、機器が錯綜しており大変複雑な環境であるため、 エンドエフェクタの位置・姿勢のみでなく、根元から先端までのすべてのリンクの形状についても指定する必要があります。 一方ゾウの鼻は筋肉で構成されているため(下図)、複雑に入り組んだ場所に入り込んだり、 あらゆるものを包み込んで把持したりすることが出来ます。このような機能を備えたマニピュレータは、 空間の自由度をはるかに超えた自由度を有していることから、超冗長マニピュレータと呼ばれ、 これは上記のような環境下における活躍も期待できます。 そこで本研究室ではゾウの鼻に着目し、超冗長マニピュレータの開発を行っています。
-
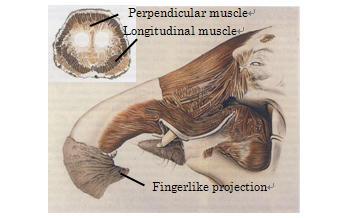
(↑図の参考文献)K.K.Smith,W.M.Kier,"Trunks,tonques,and temtacles:moving with skeletons of muscle",Am.scientist 77,2pp.8-35(1989)
研究概要
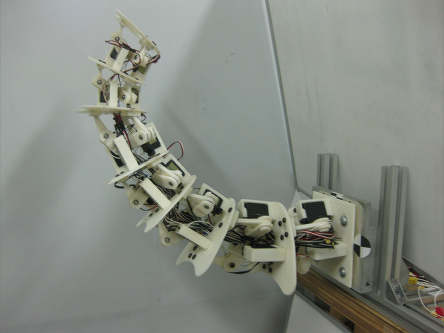
本マニピュレータは3-RRSパラレルメカニズムを直列に複数連結して構成されています。 各ユニットの幅や角度を変化させることでマニピュレータ全体の形状を柔軟に変化させることが出来ます。
-
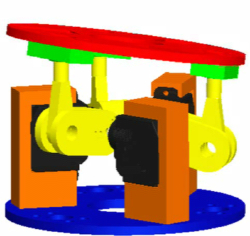
ユニット構造(3-RRS)
-

超冗長マニピュレータ(横スイング)
-
超冗長マニピュレータ(縦スイング)
-

超冗長マニピュレータ
Movie
-
上下左右動作Movie
-
伸縮動作Movie