人工筋肉マニピュレータ
人工筋肉を用いた人間共存型マニュピレータの開発
― McKibben型人工筋肉の2倍の力!軸方向繊維強化型人工筋で人間そっくりの腕を! ―
研究背景
現在人間生活にロボットが介入し、人間とロボットの関係が密接化しています。 それら人間に近い環境で動作するロボットは、作業性・安定性の観点から人間に近い特性が要求されます。 そこで本研究では空気圧ゴム人工筋肉をアクチュエータとしたマニュピレータを開発した。 さらに、人工筋肉内の圧力変化を測定し、マニュピレータの位置制御を試みました。
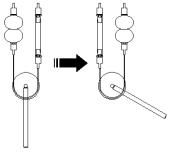
人工筋肉の収縮

人工筋肉は形状は管状になっており、素材に天然ラテックスゴムを用い、人工筋肉の軸方向にガラス繊維を貼り付けました。 人工筋肉に空気圧を供給すると、ゴム膜は膨張するが、繊維はほとんど伸びません。 その結果、半径方向に膨張し軸方向に収縮するという変形をします。 このため、人工筋肉は軸方向に引張力を生じます。 この引張力をアクチュエータとして利用します。
各関節の駆動
人工筋肉は軸方向に収縮するため、マニュピレータは、プーリにワイヤーを介し拮抗によって関節を動作させる構造となっています。 拮抗筋の片方を加圧し、もう一方を減圧させると拮抗筋肉に圧力差が生じます。 この圧力差によって収縮量の差が生じます。 この収縮量の差分をプーリよって回転運動に変換し、関節を駆動させます。
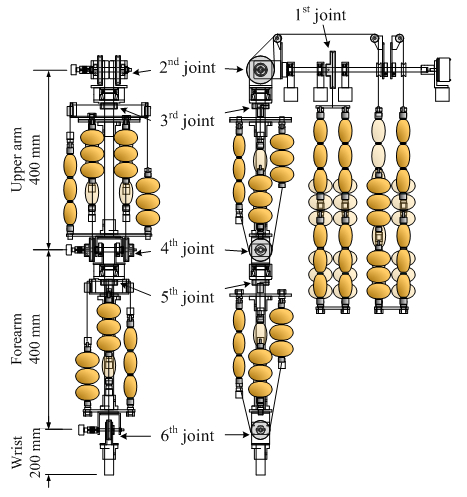
6自由度マニピュレータ
6自由度マニピュレータは、人間の腕に近い構造にすることをコンセプトに設計されました。 手先が任意の位置・姿勢をとることができるように6自由度に設定し、 肩3自由度、肘1自由度、手首2自由度として人間の腕に近い関節配置を実現しました。 軽量の人工筋肉をアクチュエータとして使用することで、マニピュレータの多自由度化に伴う重量の増加を抑えています。 本マニピュレータでは駆動範囲に重点を置いてプーリ径を決定し、人間の腕の駆動範囲を実現しました。 駆動トルクの出力が単列では不足する場合、人工筋肉を並列に配置して補うことにしました。
-
6自由度マニピュレータ
Movie
-
2009年度駆動デモンストレーション
(6関節)