3Dセンシンググループ
マルチスポット光を用いたテクスチャ付き距離画像計測システム
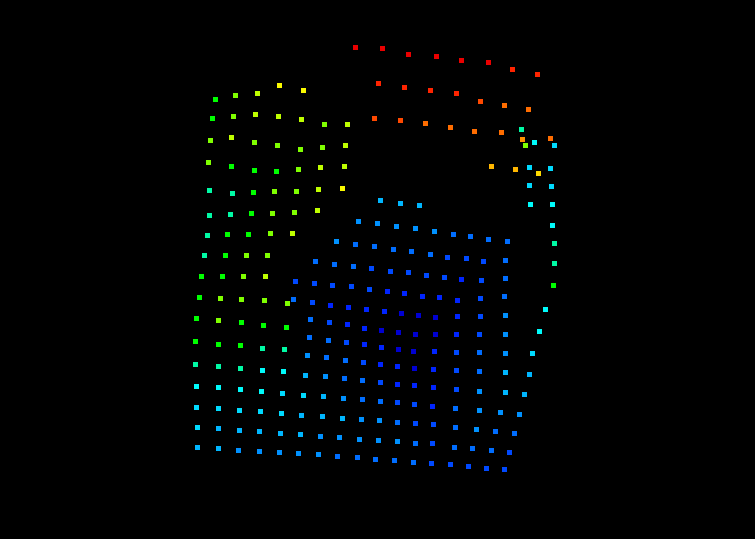
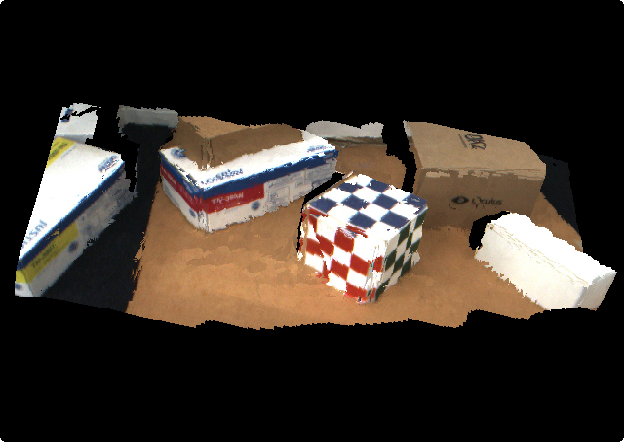
本研究ではモノクロカメラと19×19の点群を照射するレーザプロジェクタを用いて,対象の距離画像を高速に取得することができます.さらに,カラーカメラから取得したカラー画像をテクスチャマッピングすることで,高速にテクスチャ付き距離画像を取得することが可能です.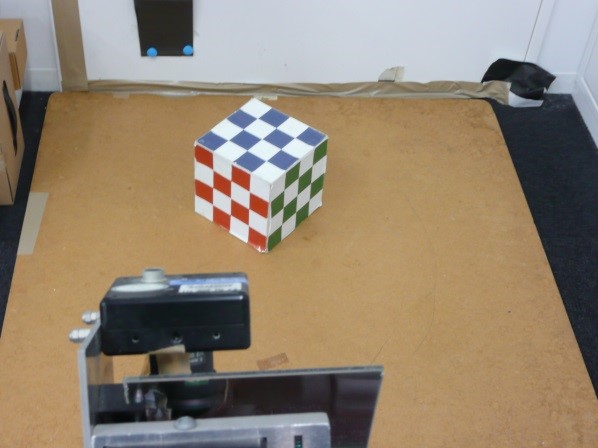 |
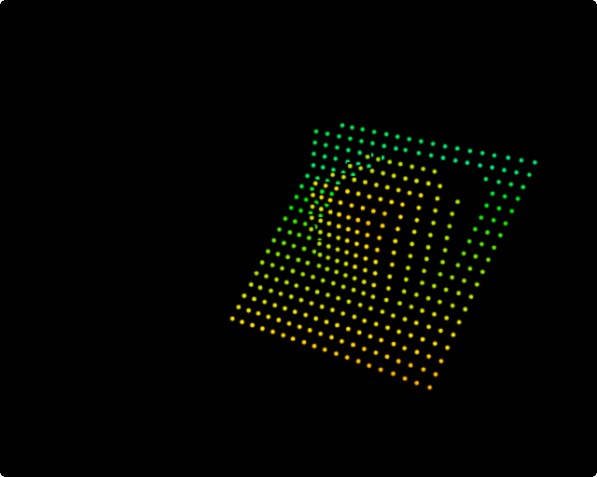 |
| 計測環境 | 取得した距離画像 |
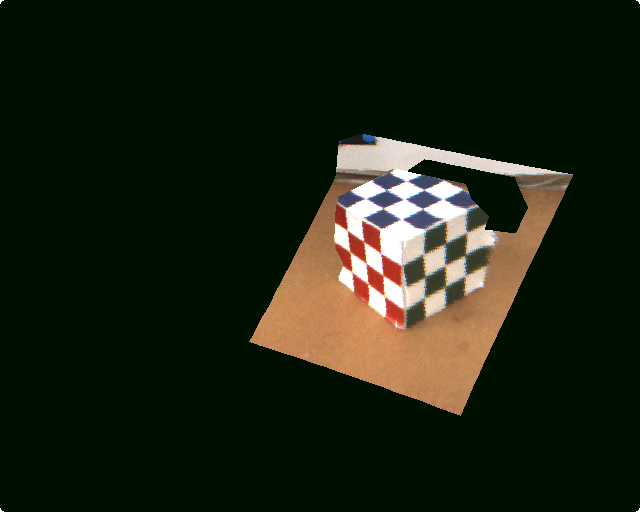 | |
| テクスチャ付き距離画像 |
-関連論文-
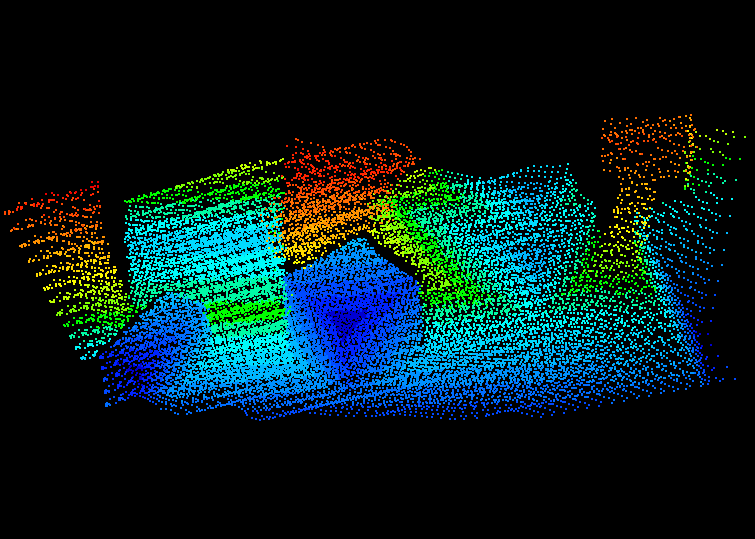
マルチスポット光を用いた距離画像センサによる三次元地図生成
距離画像センサから得られた距離画像を複数枚重ね合わせることで,あるシーンの三次元の地図を生成することが可能です.本研究では,距離画像やカラー画像を基にした運動パラメータの拘束式を用いて距離画像センサの運動パラメータを推定し,得られた運動パラメータを用いて距離画像の位置合わせを行い三次元の地図を生成しています. |
 |
| 計測環境 | 1枚の距離画像 |
 |
 |
| 3次元地図 | テクスチャ付き3次元地図 |
マルチスリット光を用いた距離画像計測システム
本研究ではモノクロカメラと15本の線を照射するレーザプロジェクタを用いて,対象の距離画像を取得することができます.レーザ光に点群ではなく線を使用することにより,密な距離画像を計測することが可能です.今後,カラーカメラから取得したカラー画像を用いたテクスチャマッピングや距離画像の取得の高速化を検討しています.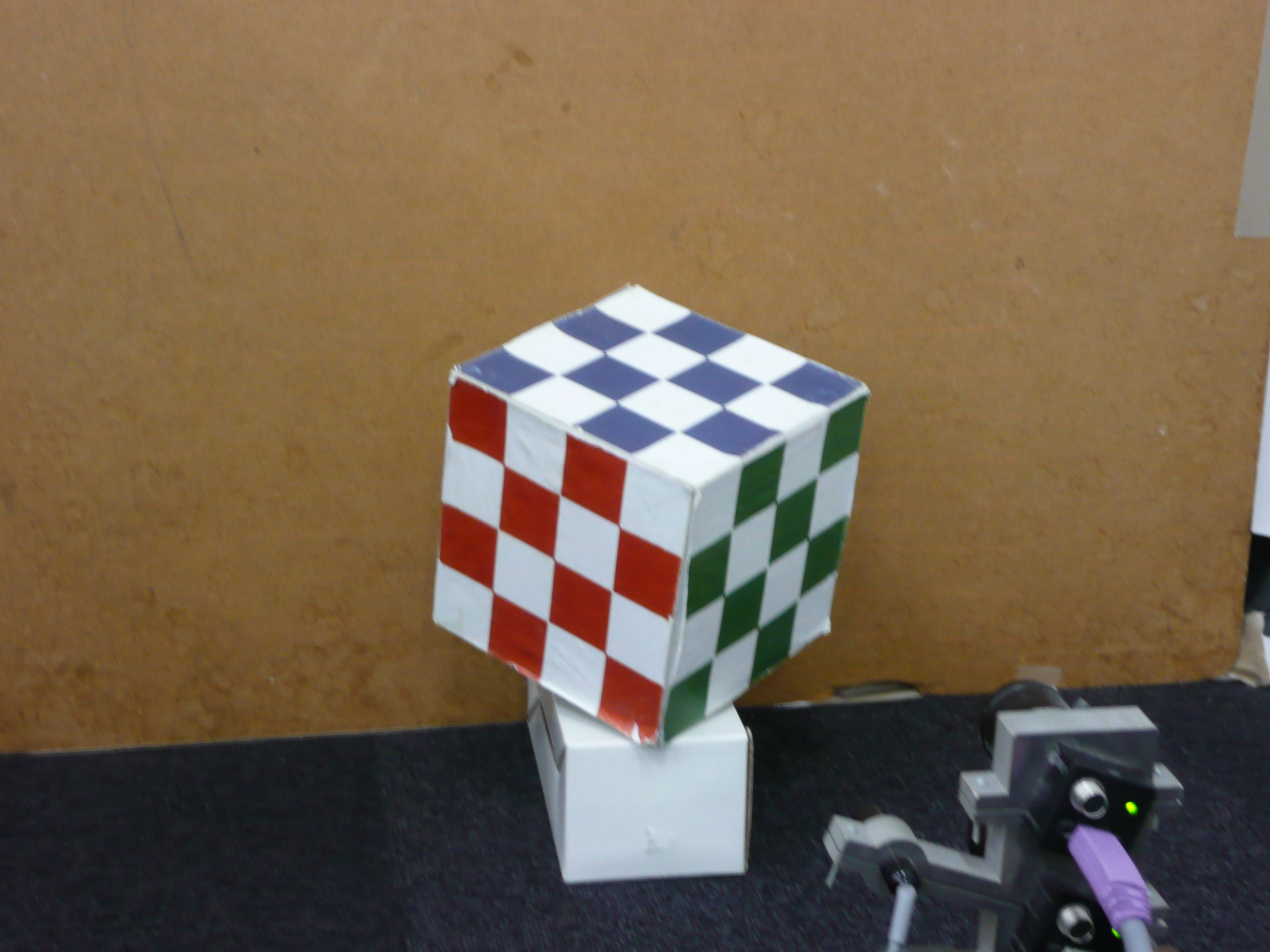 |
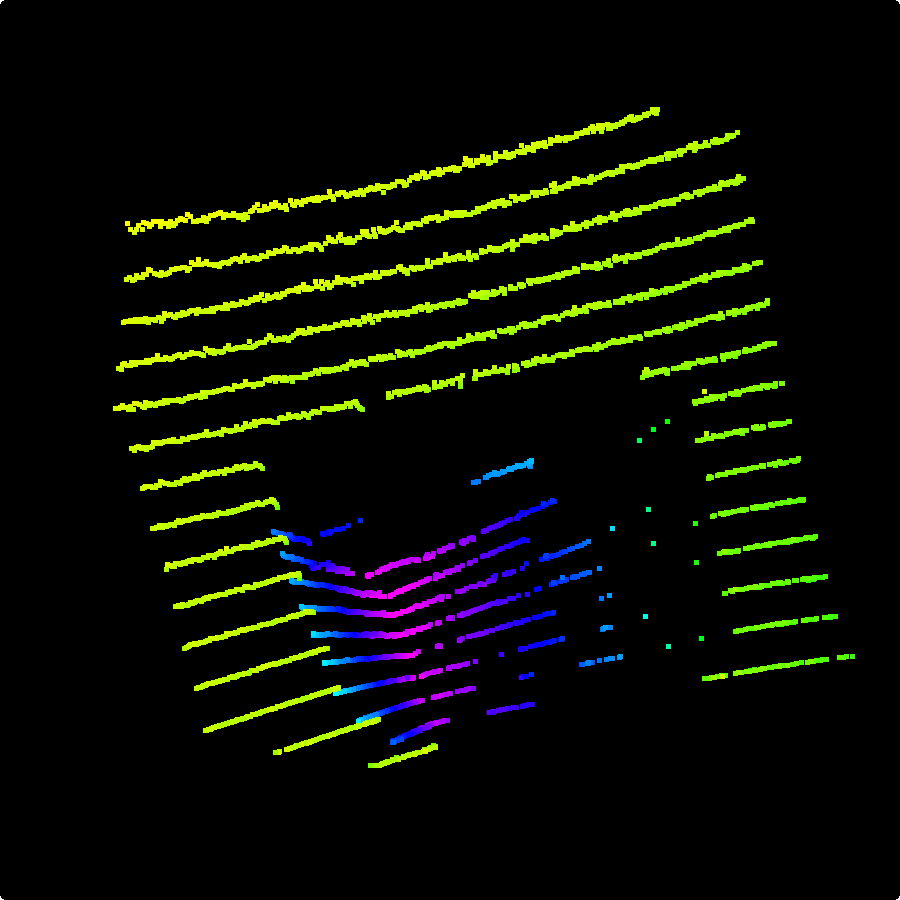 |
| 計測環境 | 取得した距離画像 |
-関連論文-
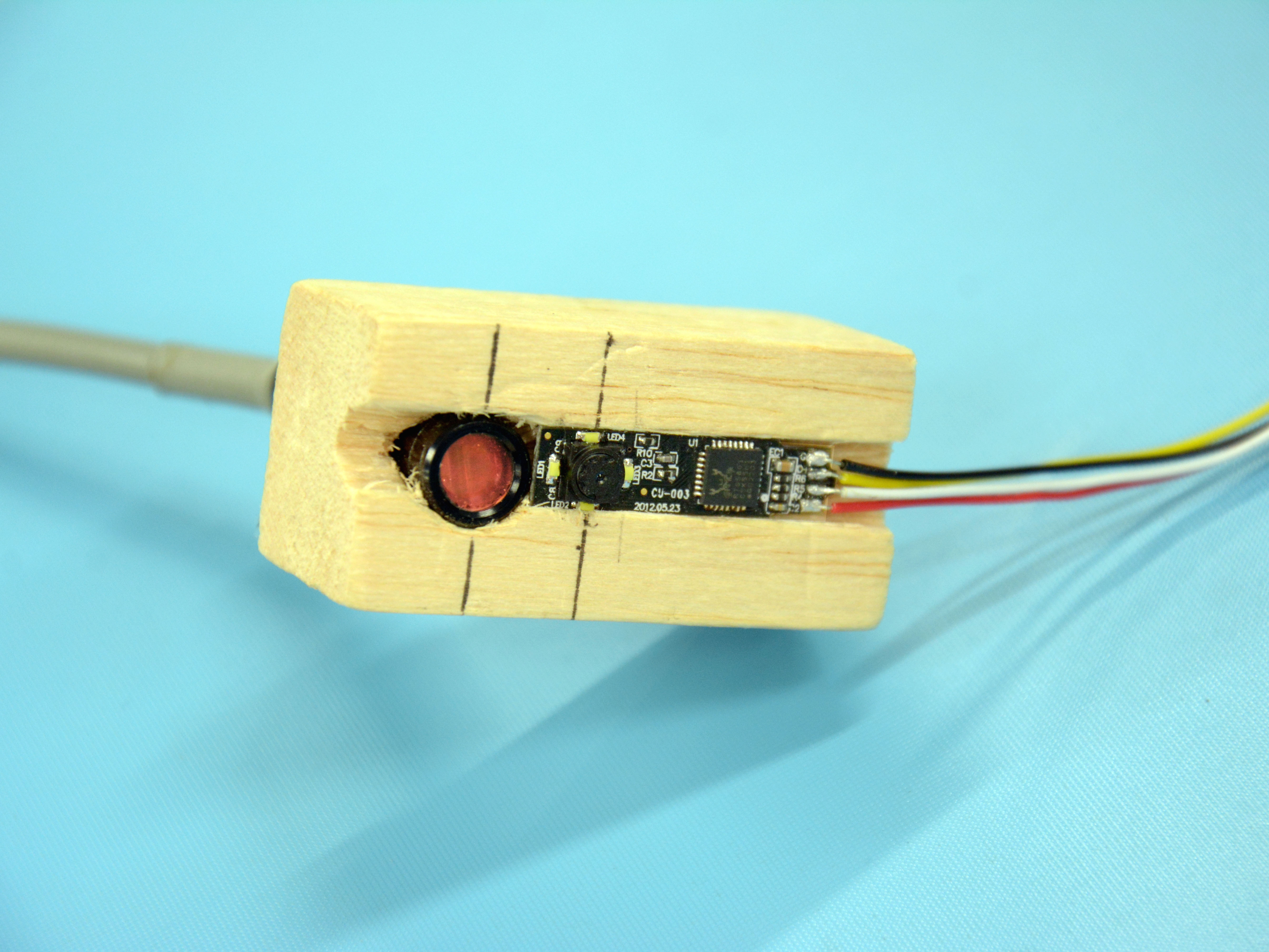
マルチスリットレーザプロジェクタとカメラを組み合わせた超小型距離画像センサ
本研究では小型カメラとレーザプロジェクタを用いて,超小型かつ近距離での計測が可能です.ロボットハンドの手先に搭載可能な距離画像センサの構築を目的としています.工業用カメラ、内視鏡用カメラなどでセンサを組み合わせて,ロボットに設置しやすいより軽くコンパクトな距離画像センサを作る研究です.このセンサは50mmから150mmの計測範囲において約2000点の距離画像を取得できます.今後は更に近距離の距離計測と高速化を検討しています.
 |
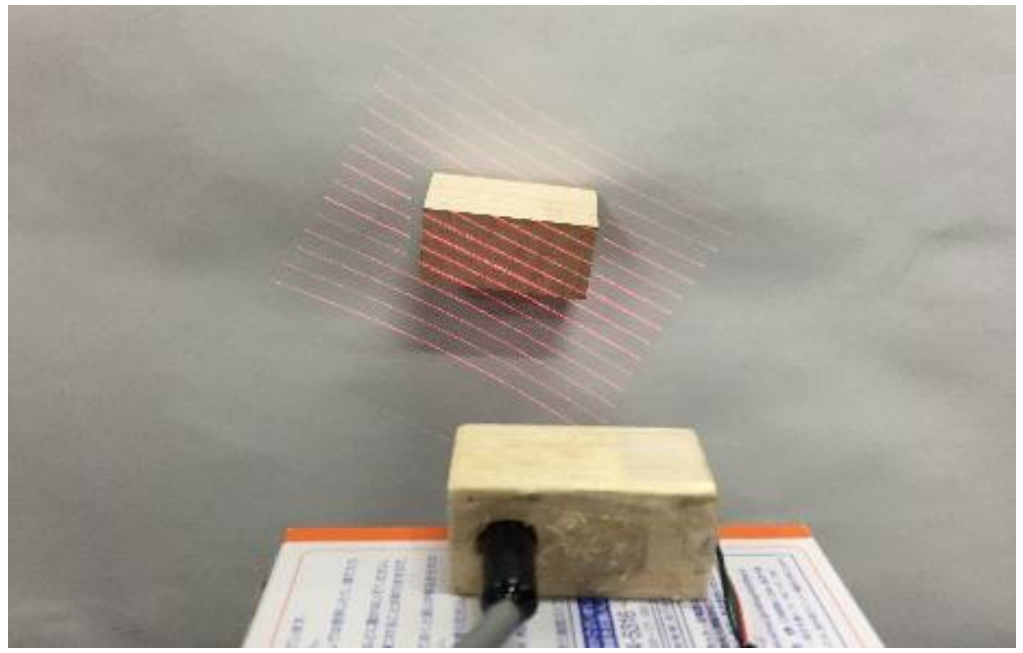 |
| 超小型距離画像センサ | 計測の様子 |
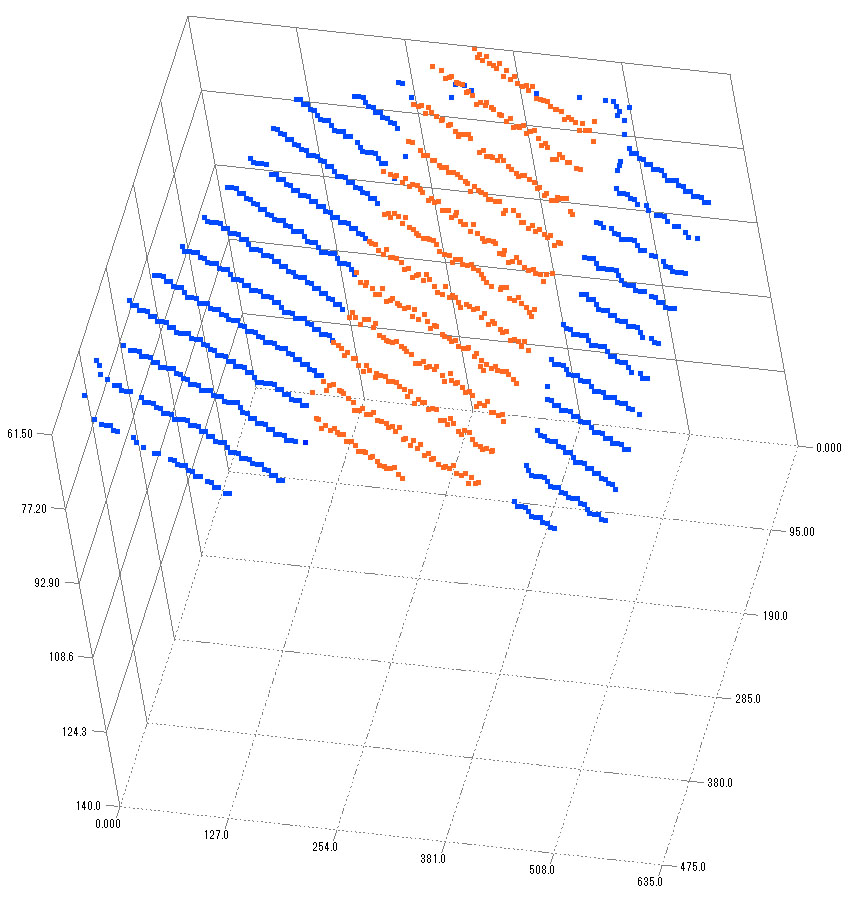 | |
| 距離計測結果 |
-関連論文-
Copyright (C) 2004 Umeda Laboratory. All Rights Reserved