移動ロボットグループ
屋内環境における手書き地図を活用した全自動 SLAM
現在,工場や空港などの屋内環境において,運搬や案内等の目的で自律移動ロボットの導入が進んでいます.自律移動ロボットには自己位置推定と地図構築を同時に行う手法であるSLAM (Simultaneous Localization and Mapping) が用いられており,走行環境の事前情報を与えることで地図構築精度を向上させることができます.本研究では,事前情報の中でも人の事前知識によって容易に作成できる手書き地図を活用したSLAMが提案しています.
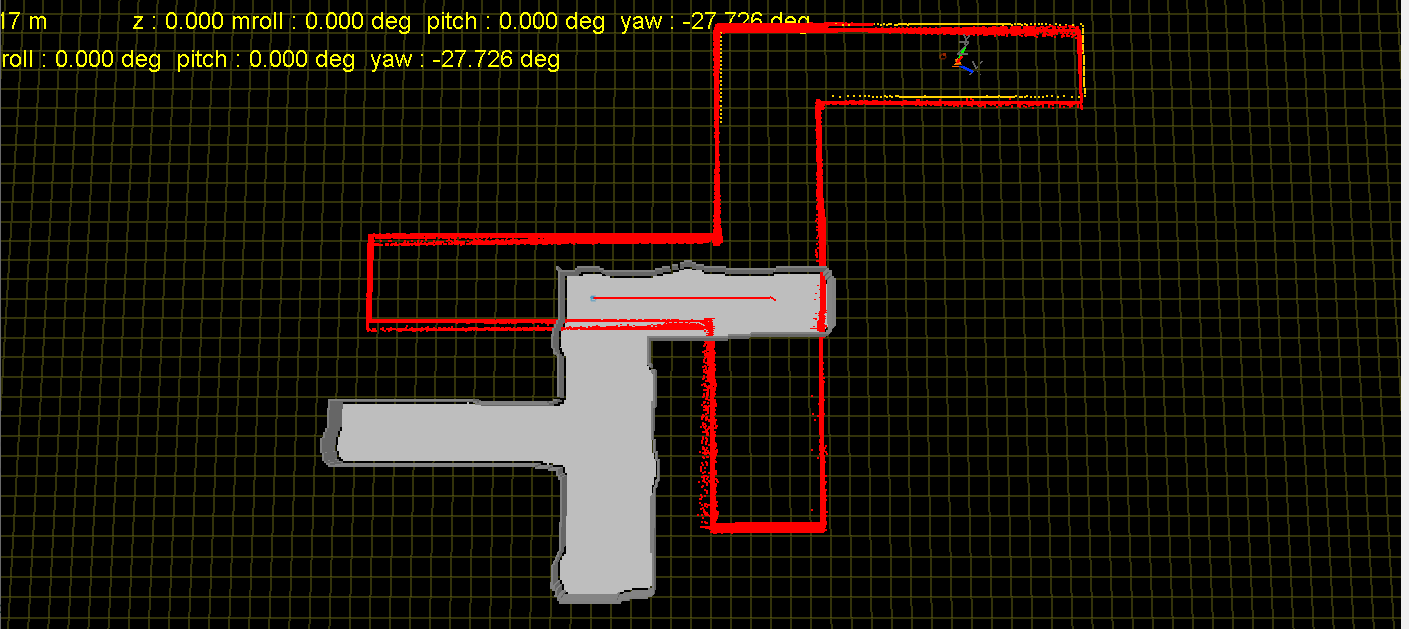
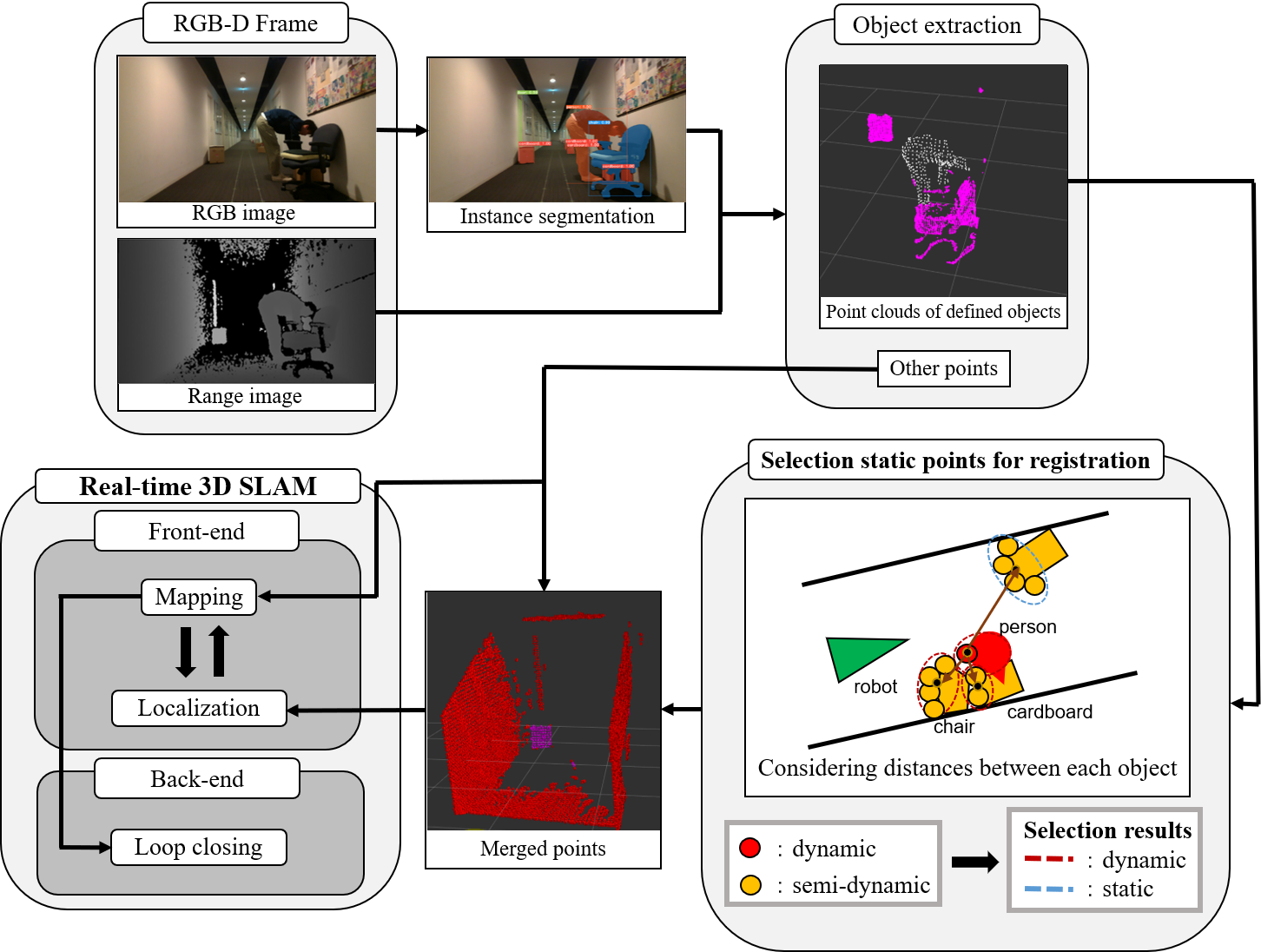
屋内における潜在的な動物体を利用したSLAMの改善
本研究では潜在的な動物体を事前に定義した上で物体検出器を利用することによって,屋内の動的環境におけるSLAMの改善を行う.一般に動的環境では,動的点群が自己位置推定精度や地図構築結果に悪影響を及ぼす.従来手法では動く可能性がある全ての物体を事前に定義して除去したが,特徴が少ない環境では退化問題が発生する.そこで,新たに潜在的な動的物体を定義して点群をできるだけ残すことで退化問題の改善を目指す.
屋内の曲がり角におけるカーブミラーを用いた衝突回避のための接近物体検出
運搬や清掃,警備などで自律移動ロボットを活用する場合,人間との衝突を回避できる必要がある.通常,移動ロボットは安全のために高速度・高加速度で移動しないため,曲がり角のような死角からいきなり現れる人間を回避することは困難である.そこで,カーブミラーに映っている景色から接近してくる人間を事前に検出し,人間の位置や移動速度を計測することで衝突回避に利用できるシステムを提案する.
二台のカメラのトラッキングの融合による移動ロボットの3次元人物追跡
一般的なステレオカメラでは,シーン全体の距離画像を極力正確に取得し,その後に得られた距離画像に対してタスクに応じた処理を行っています.これに対して,本研究では個々のカメラでタスクに応じた処理を行い,その後に処理結果を融合することで,必要な対象のみに関しての3次元情報を取得するという手法を提案しています.具体的なタスクとして物体の3次元トラッキングを取り上げ,個々のカメラで物体検出・トラッキングを行い,その結果を統合することで3次元のトラッキング情報を取得する手法を構築しています.
-関連論文-
本多 明彦, 梅田 和昇, "二台のカメラのトラッキングの融合による移動ロボットの3次元人物追跡," 日本機械学会ロボティクス・メカトロニクス講演会2018講演論文集, 1A1-M09, June 2018.
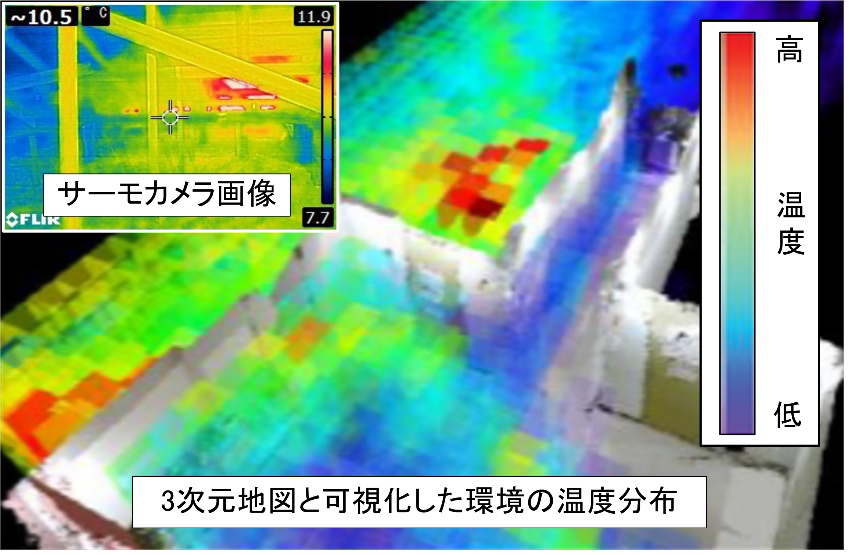
環境の持つ物理的属性を考慮した地図構築
被災した原子力発電所には人が立ち入ることが困難であるため,ロボットによる廃炉活動が注目されています.
被災後の環境情報収集・状況把握やロボットの制御には環境地図が必要不可欠です.
本研究では,SLAM(Simultaneous Localization and Mapping)等の技術を用いた原子力発電所内の環境地図生成を目的としています.
被災した原子力発電所には,水溜まりや熱源等の物理的に特徴のある領域が見られます.
これらの特徴的な情報を活かしつつSLAMを行うことで,環境地図の精度を向上することを目指します.
移動ロボットによる人物追跡 - 照明変動に頑健なターゲット追跡
荷物運搬ロボット等への応用を目標とした,人物追跡システムを構築しています.カラー画像から得られるターゲットの特徴が,照明変動の影響を受けやすい問題の解決を図っています.ステレオカメラを用い,得られたカラー特徴と位置特徴に照明変動に応じて重みづけを行うことで,実環境においてロボットによる人物追跡に成功しています.
-関連論文-