ミミズを規範とした蠕動運動型ロボット
・蠕動運動とは?
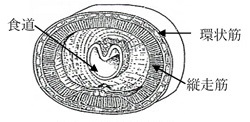
ミミズは約150の体節から成り立っていて,縦走筋と環状筋という2つの筋肉層を使ってこの体節を「細く長く」「太く短く」することができる(図1).ミミズが蠕動運動により前進する様子を図2に示す.ミミズははじめに頭部の体節を収縮させ,この収縮を順に後方の体節へと伝播させながら頭部の体節を伸長させてゆく.このとき収縮した体節と地面との間に摩擦が発生し,伸長した体節が前方に伸びるための反力を得ることができる.この収縮と伸長の繰り返しにより縦波後進波が発生し,ミミズは前進することができる.
 |
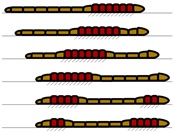 |
| 図1 ミミズの筋肉層 | 図2 ミミズの蠕動運動による移動 |
・ミミズの蠕動運動のメリット
この蠕動運動には,以下の3点のメリットがある.① 移動に必要な空間が他の移動手段(たとえば,歩行,車輪走行,蛇行等)に比べて最も小さい(図3).
② 周辺環境に対して接地面積を大きく確保することができる.したがって,安定的な移動と大きな牽引力が得られる(管内の登攀等も可能).
③ ミミズの内部は食道になっており空洞である.したがってその空洞部に既存のカメラやメンテナンス装具等を出し入れすることが可能となる.
以上より,この運動様式を利用としたロボットを開発すれば,人間や他のロボット機構では入り込めない細管内や不整地,地中などでの移動が可能となり,レスキューや医療,細管検査,極限探査等の分野での適用が期待できる.
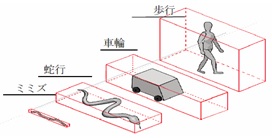
図3 様々な移動様式
応用研究
![]()
![]()
![]()
![]()
![]()